

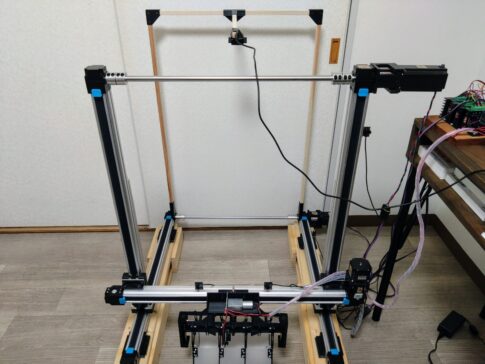
リニアガイドをArduino+JetsonNano+Webカメラで動作させる
リニアガイドをArduino+JetsonNano+Webカメラで動作させてみたのでその備忘録用の記事となります。 まずはステッピングモーターを動かしてみる Arduino と A4988 でステッピングモーターを制御す...
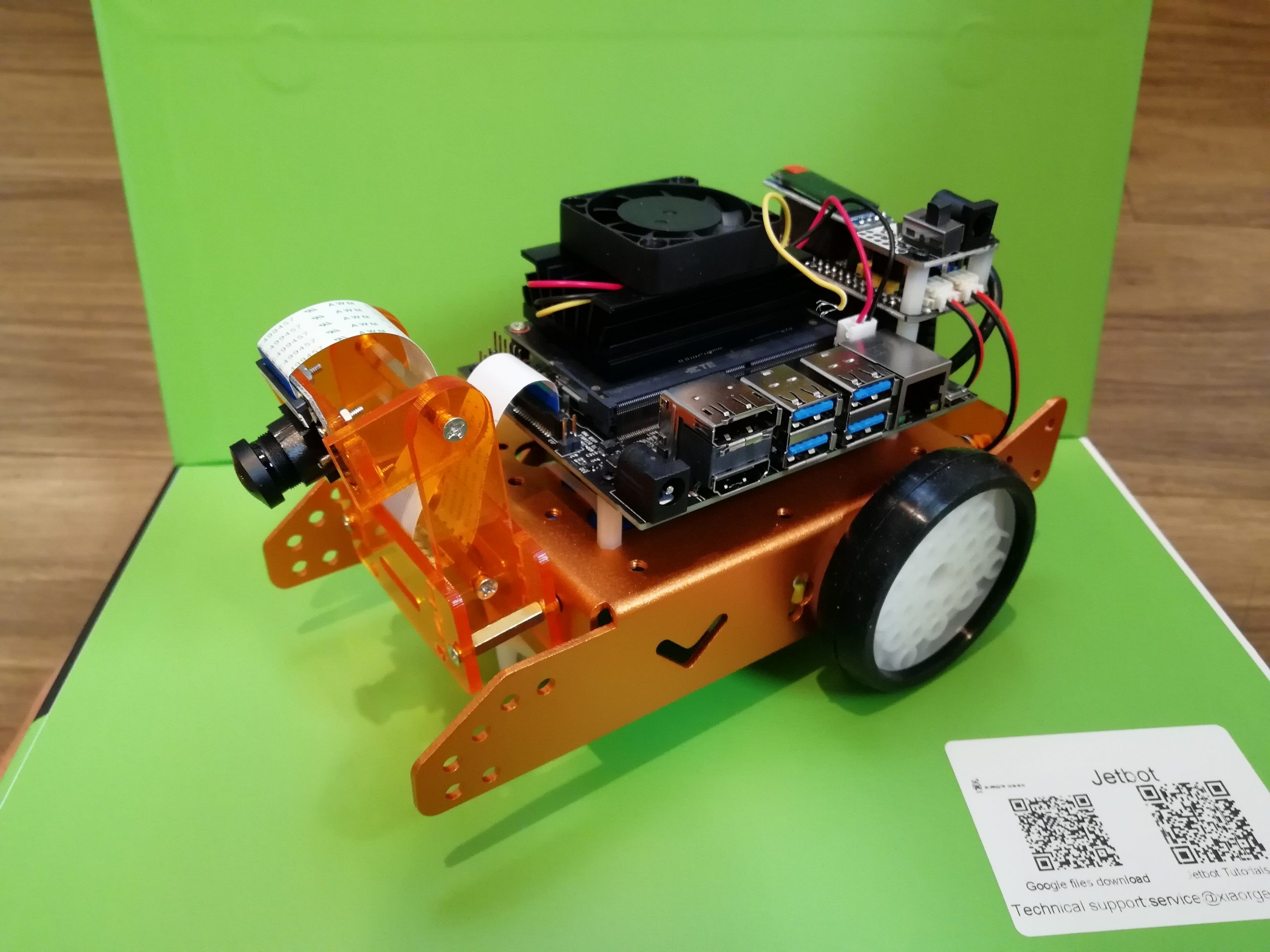
 ゴミ回収ロボット
ゴミ回収ロボットリニアガイドをArduino+JetsonNano+Webカメラで動作させてみたのでその備忘録用の記事となります。 まずはステッピングモーターを動かしてみる Arduino と A4988 でステッピングモーターを制御す...
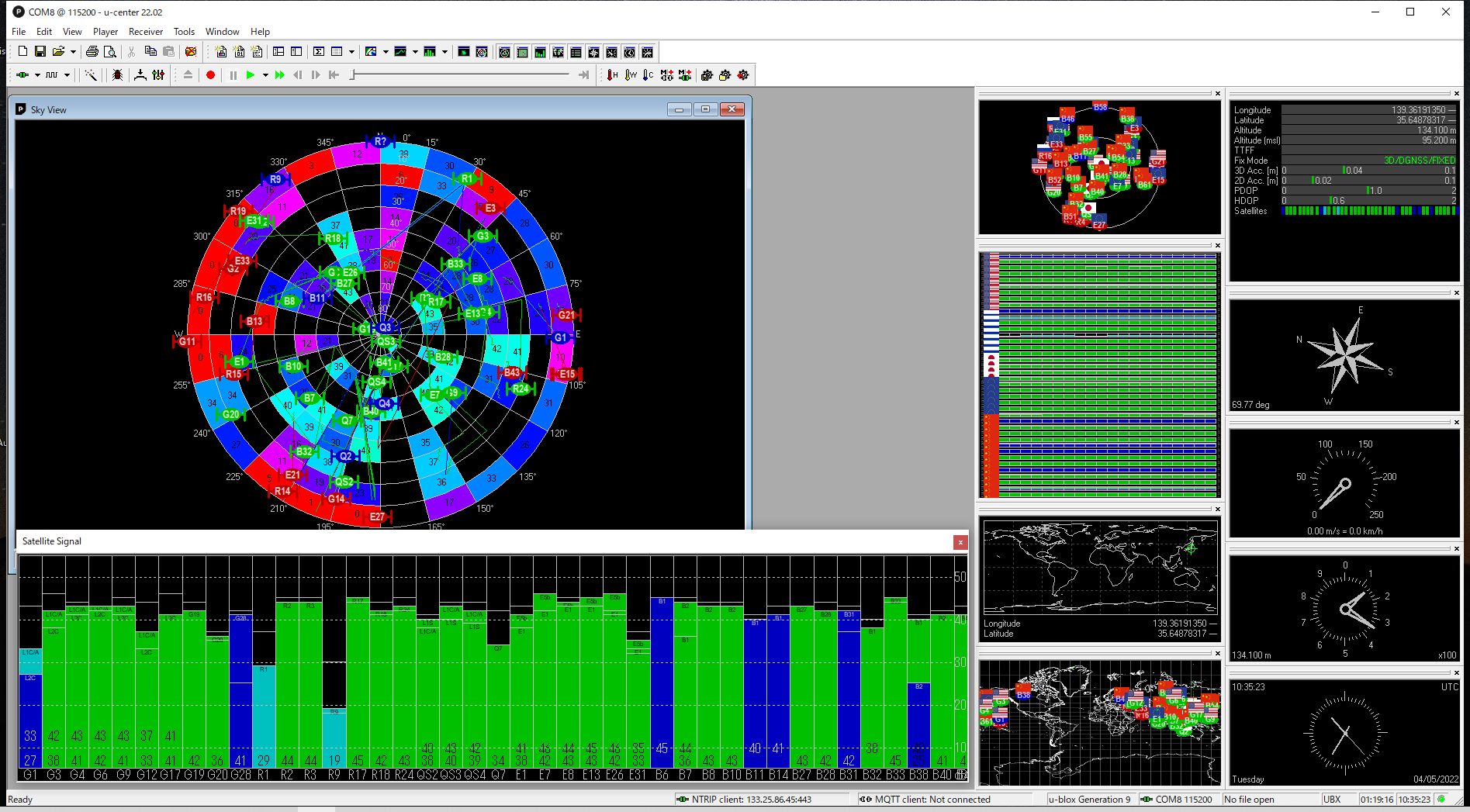 電子工作
電子工作今回はトラ技2周波RTKスタータ・キットを使ってcm級測位してみたのでそのときの備忘録を残しておきます。 購入したもの 以下のCQ出版社のページから「トラ技2周波RTKスタータ・キット」を購入しました。 ・トラ技2周波R...
 電子工作
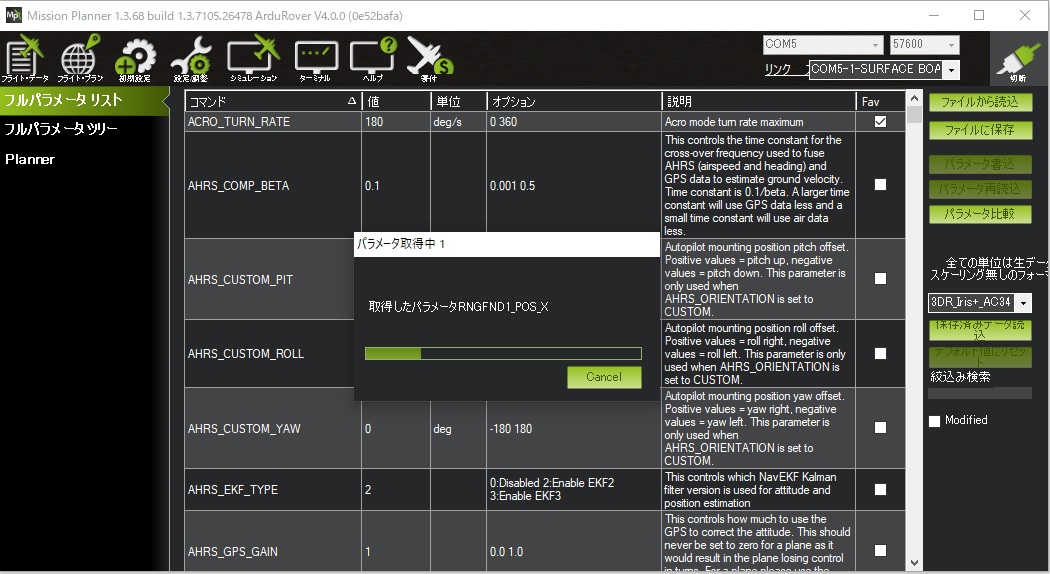
電子工作MissionPlannerに接続すると、パラメータのロードが「STAT_RUNTIME」で止まる現象が発生しました。今回はその対応を記載しておきます。 参考になったページはこちらです。 Mission planner ...
 AI
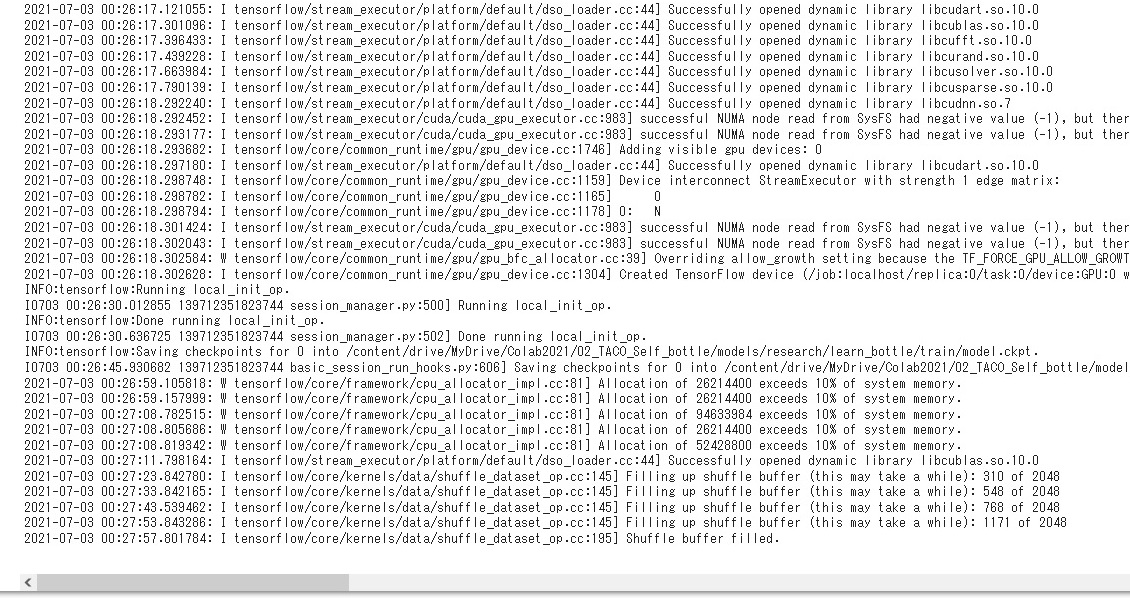
AItensorflow 1.15.0でRetrain SSD MobileNet V1 detector for the Edge TPU (TF1) を試しているときにこちらのエラーが発生して強制終了してしまいました。 ...
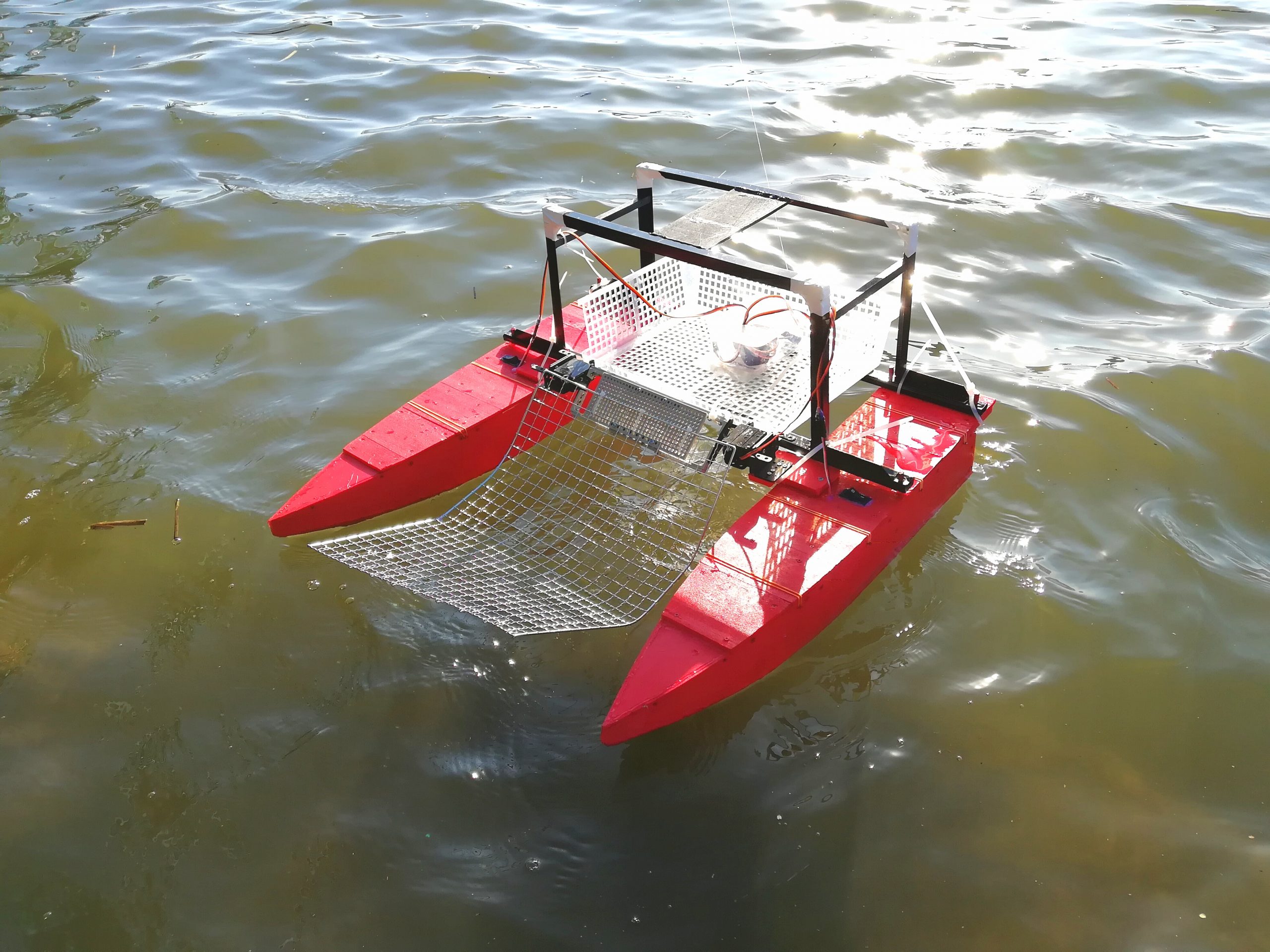 ゴミ回収ロボット
ゴミ回収ロボットこの投稿はパスワードで保護されているため抜粋文はありません。
最近は動画の画素数とFPSについて改めて勉強していまして、伊藤ノリ(Nori Ito)さんという方の説明動画がとても分かりやすかったのでそちらを備忘録として残しておきます。 画素数の違い(SD, HD (720p), F...
 AI
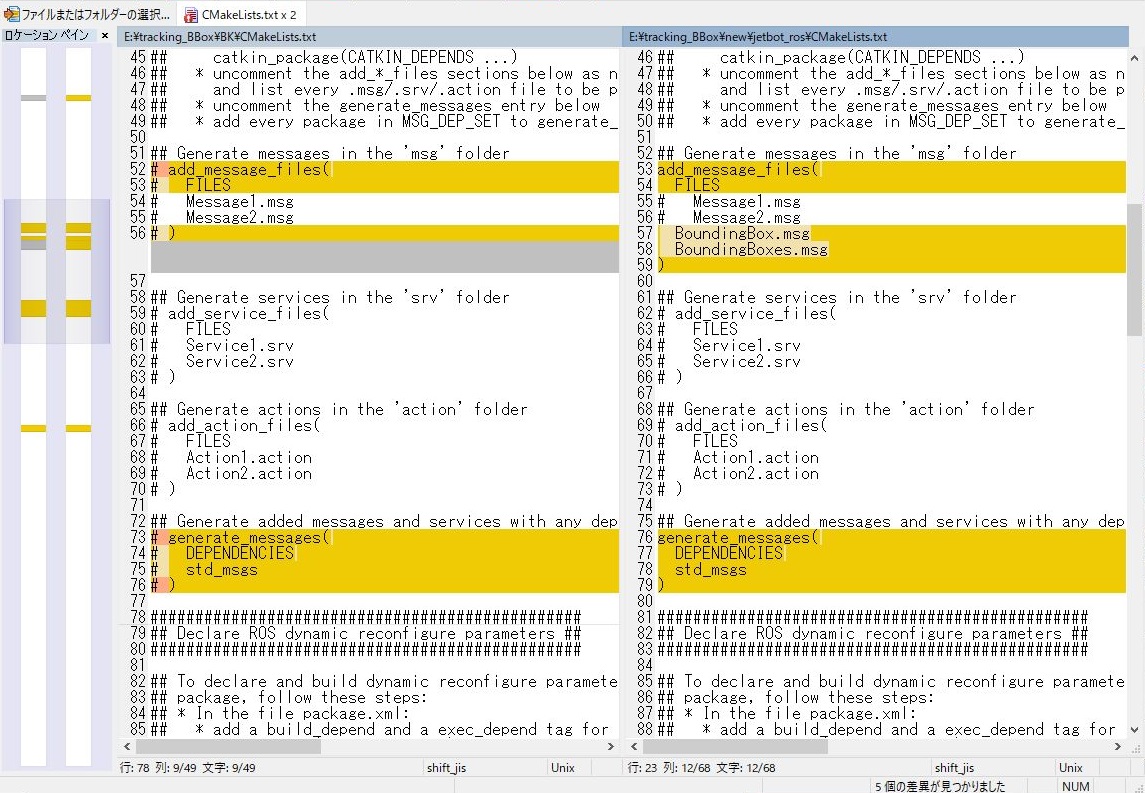
AI今回は物体検出で取得したBoundingBoxをROSでpublishする方法について記載していきます。 物体検出した場合、その結果のBoundingBoxなどをどのように連携して利用するかというところが課題になってくる...
 AI
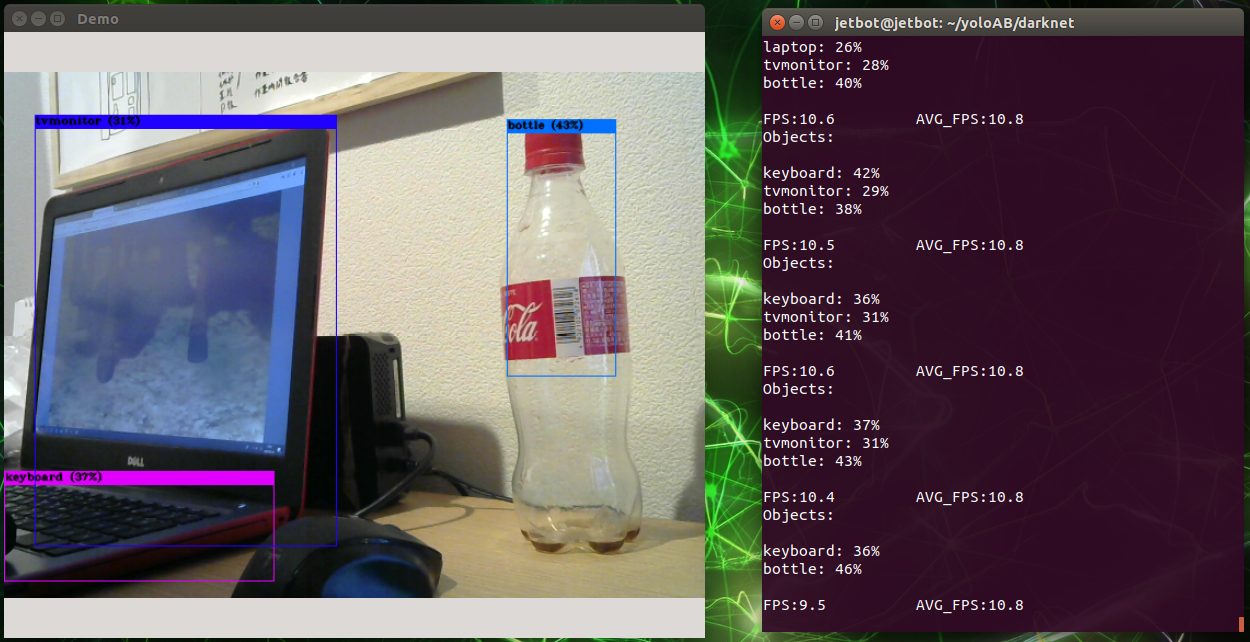
AI今回はJetsonNanoにdarknet(AlexeyAB)を入れて物体検出する方法を紹介します。 参考記事 今回はこちらの記事の内容を参考にしています。 【物体検出】vol.2 :YOLOv3をNVIDIA Jets...
 AI
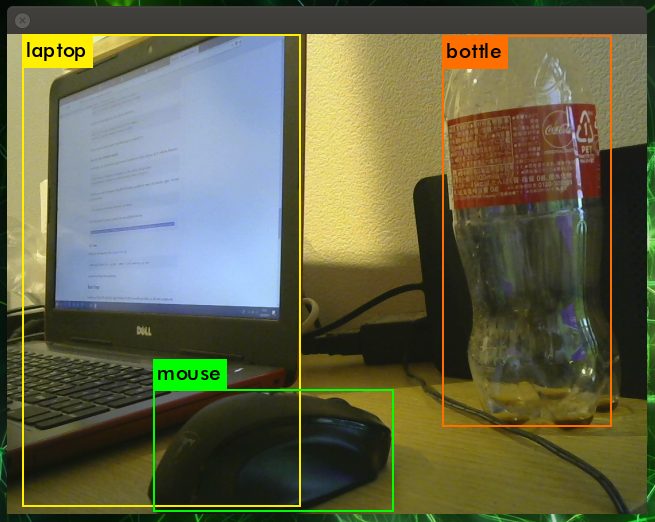
AI今回はJetsonNanoにdarknet_rosを入れて物体検出する方法について紹介していきます。 こちらを行うとJetsonNano上でYOLOv3などの物体検出を行うことができるようになります。 今回はROSを利用...
 雑記
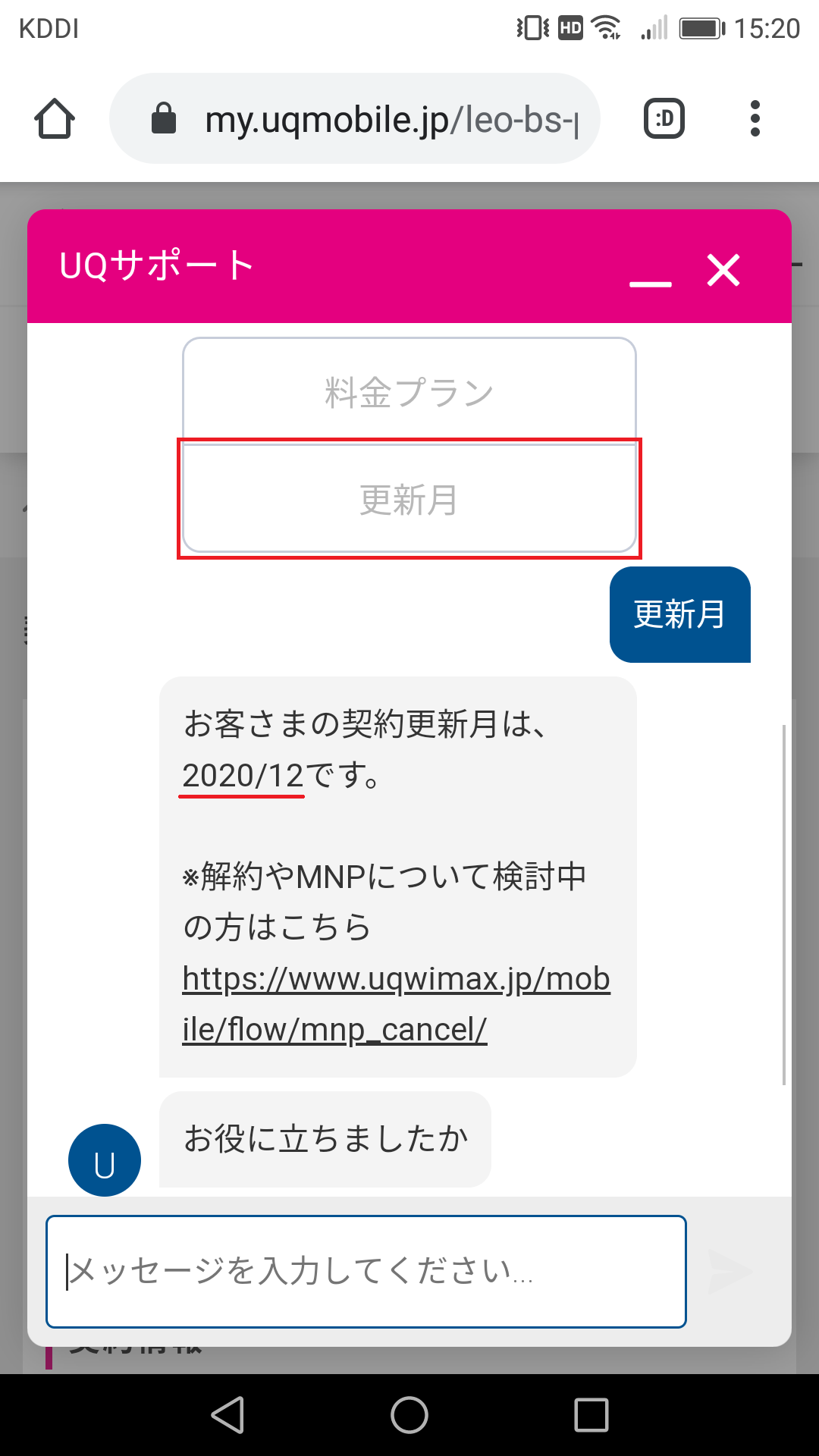
雑記UQモバイルから他者のスマホに乗り換えたいとき、気になるのが更新月ですよね。 契約したときは覚えていても2年も経過するとどうしても忘れてしまいます。 私も更新月を確認しようとしてみたところ、確認できる方法が変わっているよ...
 雑記
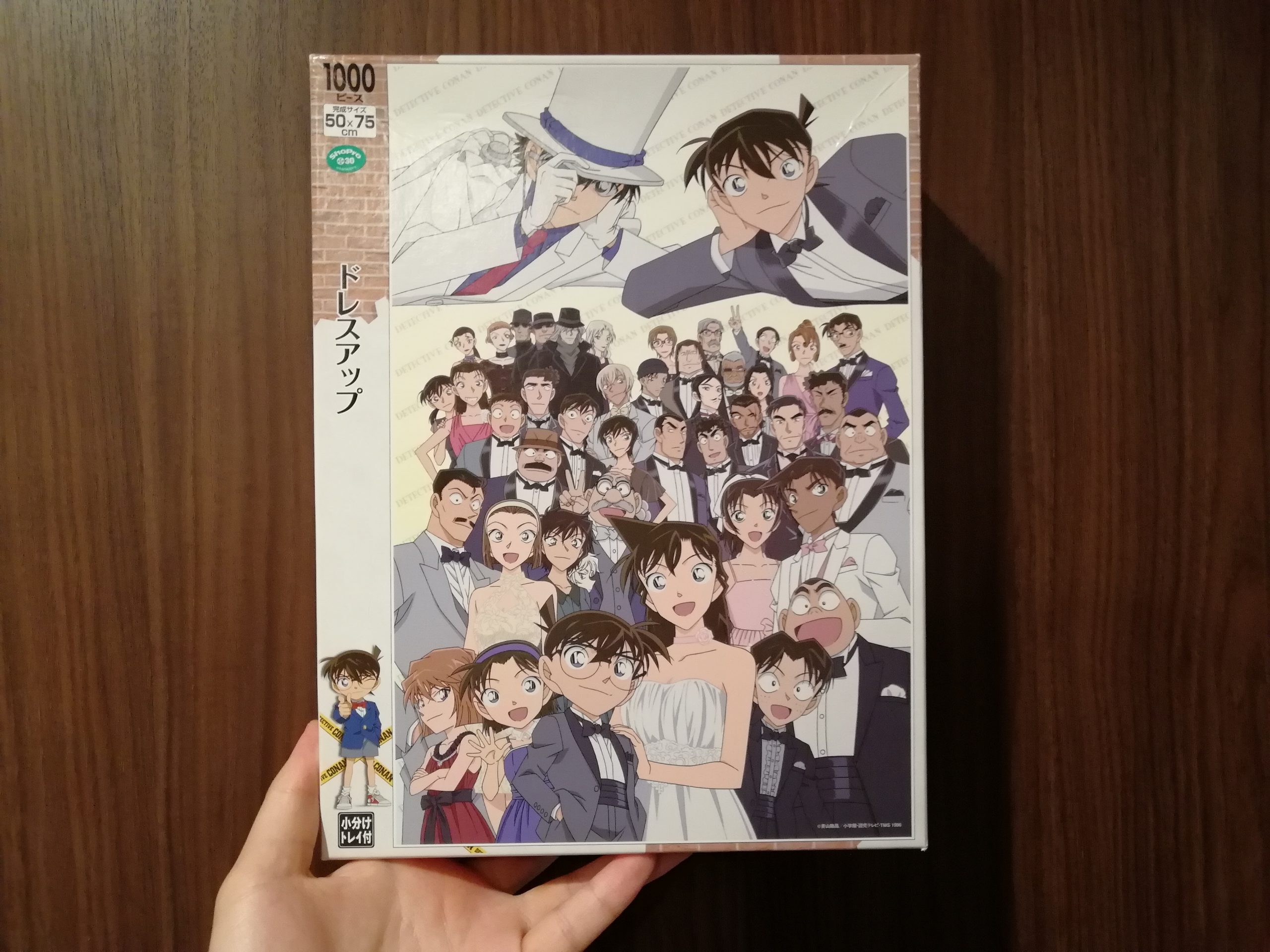
雑記コロナの影響もあり今年は自宅で過ごす人も多いと思います。 私も自宅で過ごす時間が増えましたので、以前プレゼントでもらった名探偵コナンの1000ピースパズルをやってみることにしました。 そのときにコツのようなものが分かりま...
 電子工作
電子工作今回はJetsonNanoで動画を撮影する方法について紹介していきます。 JetsonNanoで動画を撮影する場合、以下のいずれかのカメラを使用することになると思います。 ①WEBカメラ(USBコードで接続) ②Rasp...
 電子工作
電子工作今回はJetsonNanoの電源として使えるモバイルバッテリーについて書いていきます。 現在JetsonNanoを使用してロボットを制作しており、そのときに問題になったのが電源です。 自宅のコンセントがある場所であればA...
 AI
AI今回はJetsonNanoでROSを自動起動する方法について説明していきます。 JetsonNanoにROSを入れ、例えばロボットを動かすときなどに毎回ターミナルでROSを起動するのは面倒かと思います。 そこで今回はJe...
 電子工作
電子工作今回はJetsonNanoとPCA9685を組み合わせたときに発生したエラーについてです。 PCA9685にはさらにサーボモーターを接続してこちらをサンプルプログラムで動かすところまで説明していきます。 PCA9685の...
 電子工作
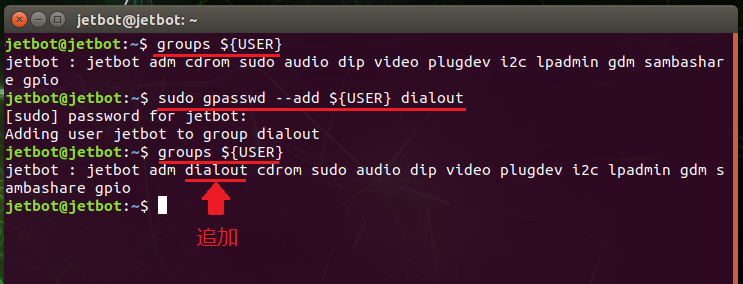
電子工作JetsonNanoのシリアルポートを利用するときに悩んだこと JetsonNanoのシリアルポートを利用して他のマイコンと通信するとき、起動するたびに以下のコマンドを実行して権限を与える必要がありました。 [crayo...
 電子工作
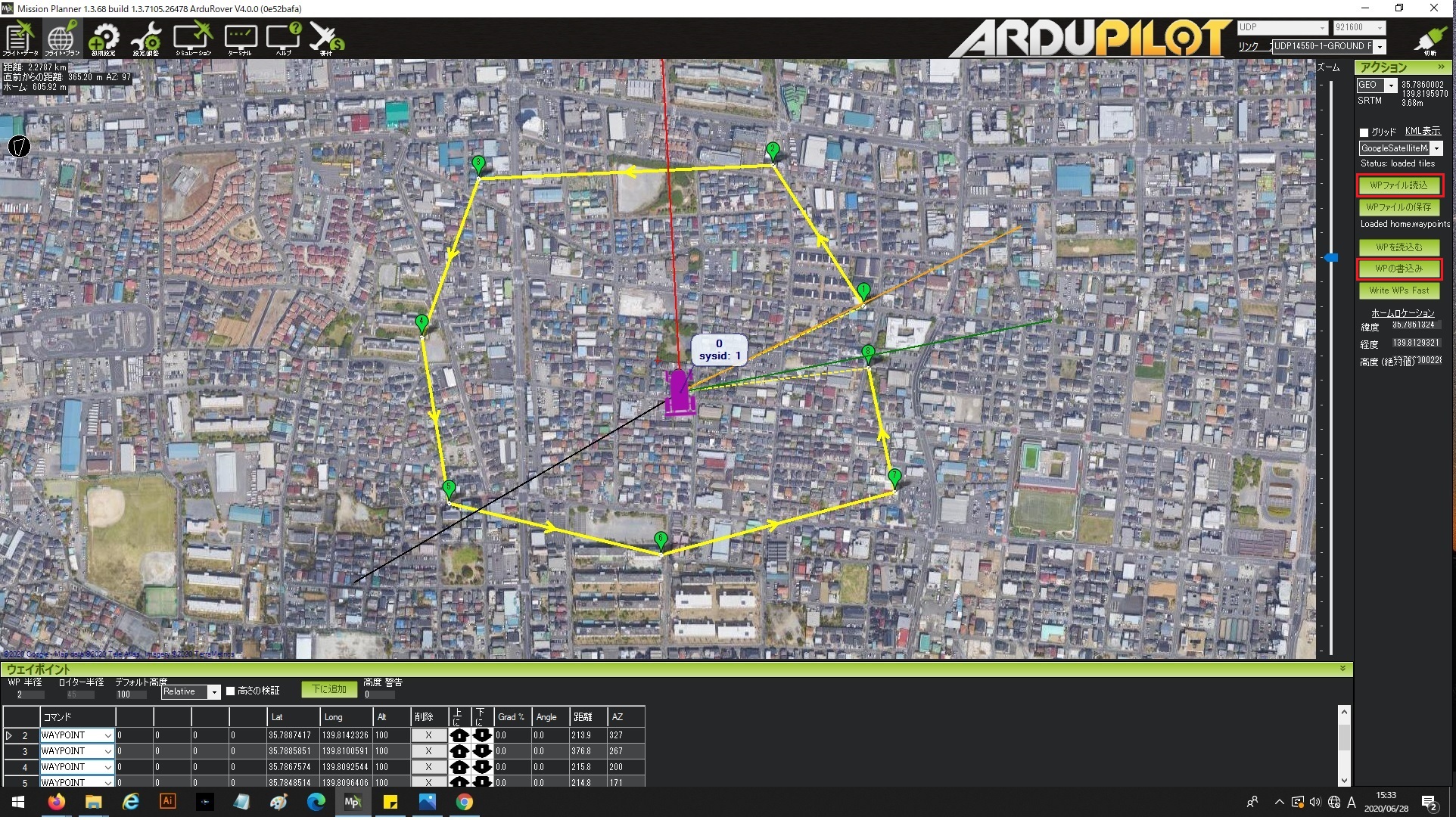
電子工作今回はPixhawkのRoverをクローラー形式にする方法について説明していきます。 通常、PixhawkでRoverをセッティングすると「スロットル」と「ステアリング」でRoverの自動運転の制御を行うことになると思い...
 C#
C#今回はC#のラムダ式について記載していきます。多少仕事のほうでも使ったりするので基本のおさらいです。 LINQ文をラムダ式で記述した場合 まずはVisualStudioで「lambda_expressions_sampl...
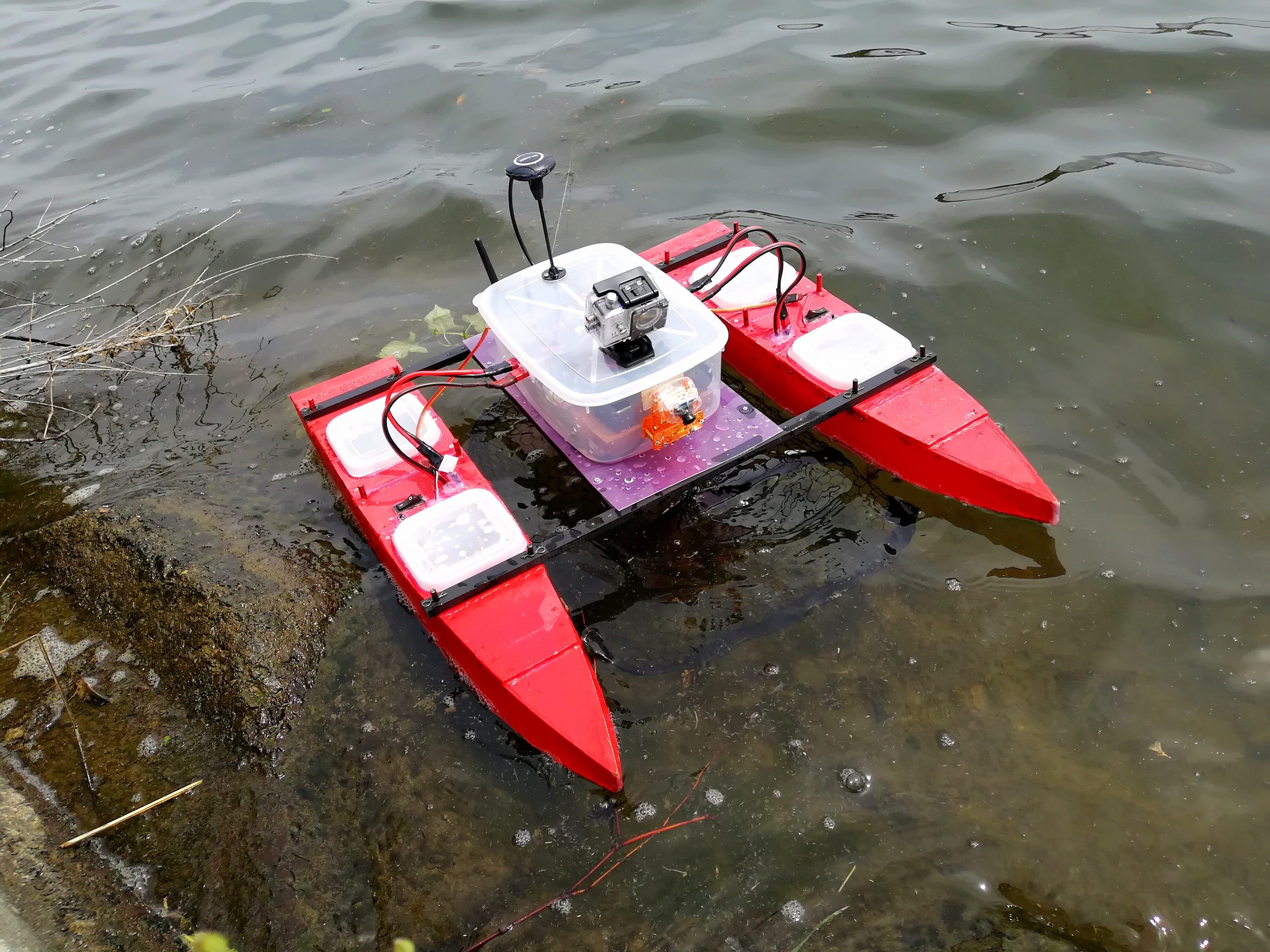
 電子工作
電子工作Roverの制作方法 今回使用したRoverの制作手順は以下の記事に記載しました。 pixhawkを設定してROSでRoverを動かす方法 上記で制作したRoverがこちらとなります。 Roverの自動運転を開始する手順...
 電子工作
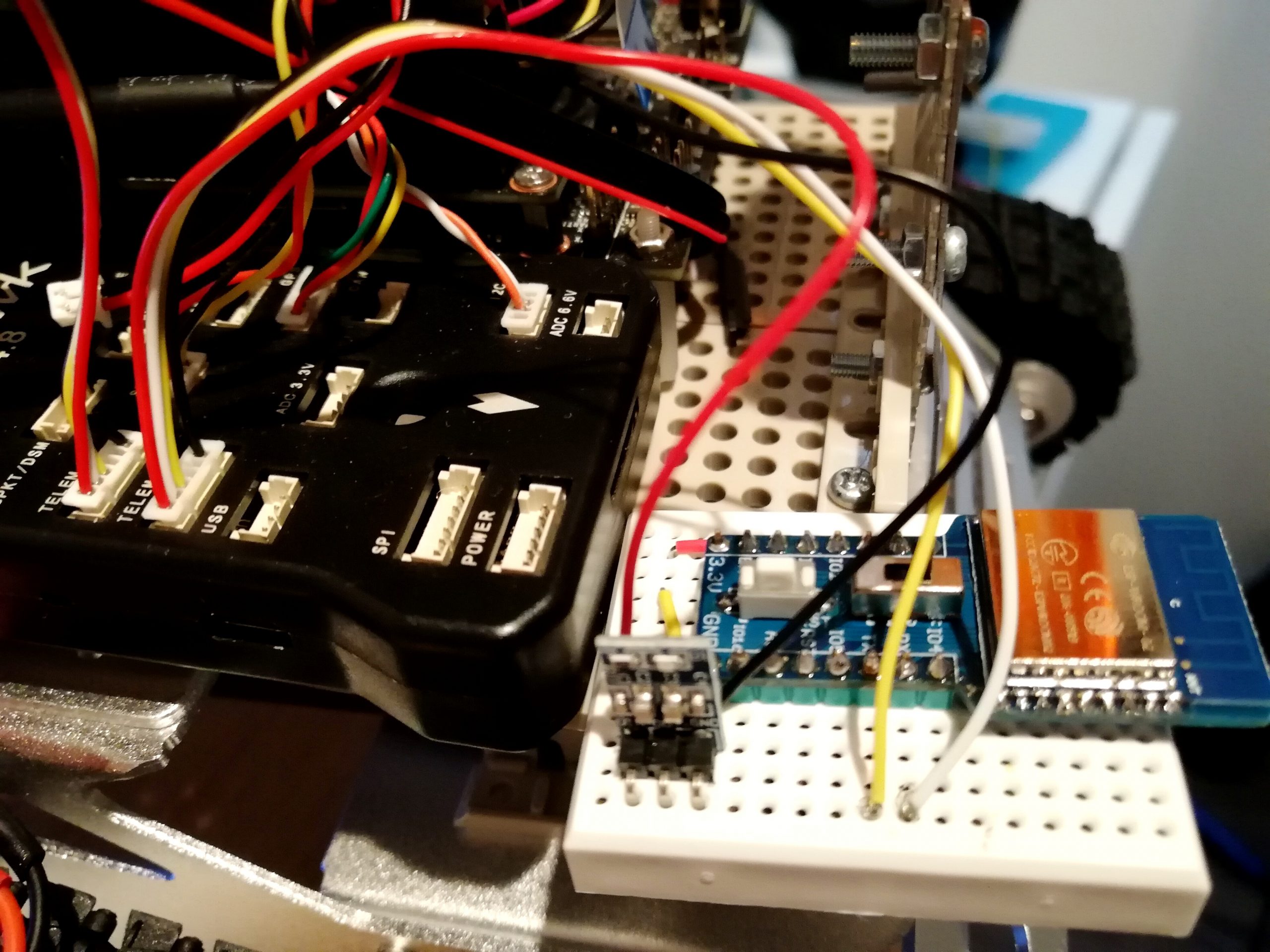
電子工作今回はpixhawkの無線通信をESP-WROOM-02で行ってみましたので、その備忘録を残しておきます。 参考にした記事 以下の記事を参考にしました。 本家のサイトの記事です。基本的にはこちらに記載されている内容の設定...

KAZUKIです。
モノづくりが好きで、ブログでは電子工作やゴミ回収ロボットのことを書いています。
その他雑記も書きます。興味のある記事がありましたら是非読んでみてください。
< Twitterプロフィール >
https://x.com/RoomKazuki