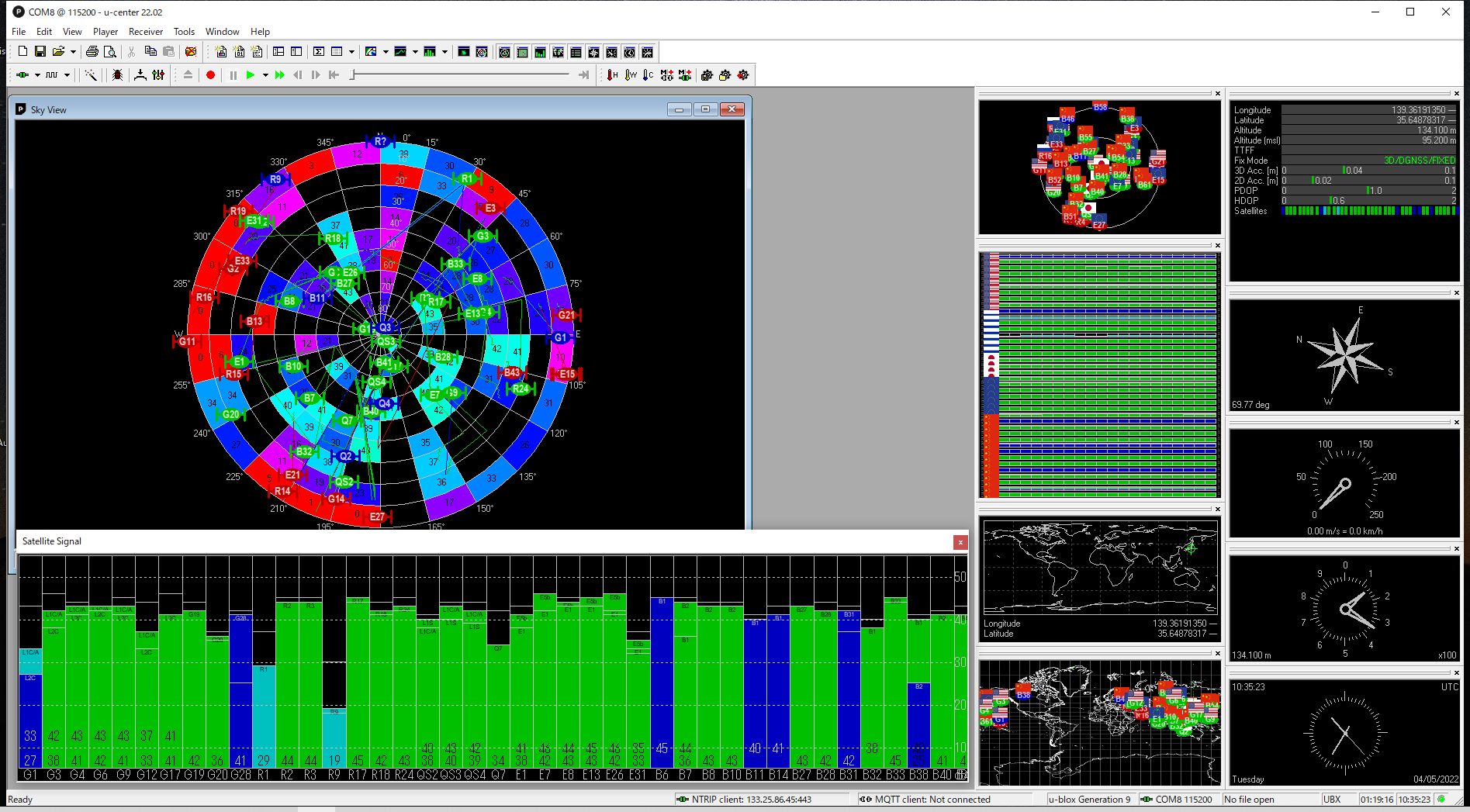
トラ技2周波RTKスタータ・キットでcm級測位してみた
今回はトラ技2周波RTKスタータ・キットを使ってcm級測位してみたのでそのときの備忘録を残しておきます。 購入したもの 以下のCQ出版社のページから「トラ技2周波RTKスタータ・キット」を購入しました。 ・トラ技2周波R...
 電子工作
電子工作今回はトラ技2周波RTKスタータ・キットを使ってcm級測位してみたのでそのときの備忘録を残しておきます。 購入したもの 以下のCQ出版社のページから「トラ技2周波RTKスタータ・キット」を購入しました。 ・トラ技2周波R...
 電子工作
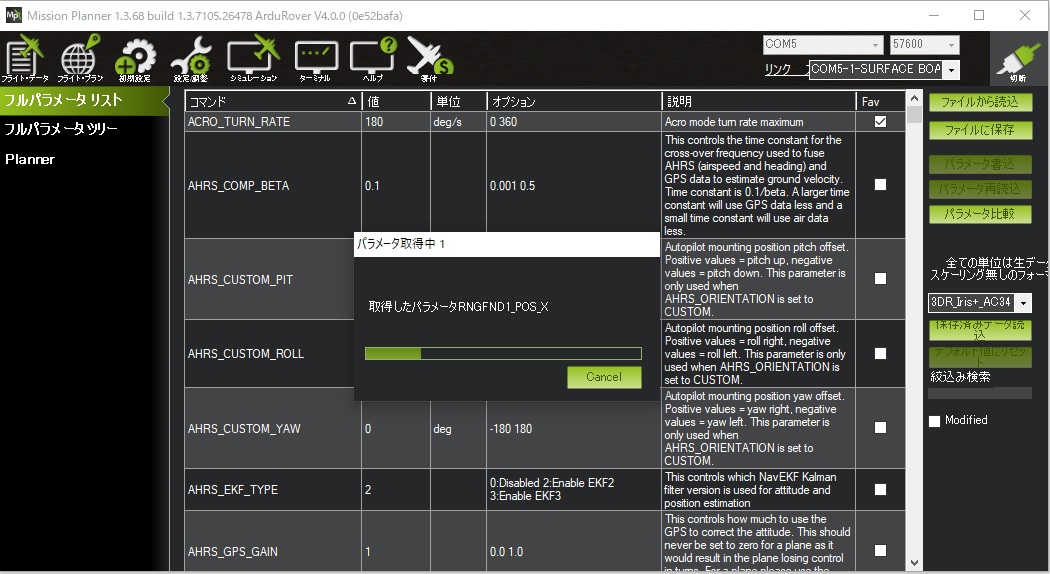
電子工作MissionPlannerに接続すると、パラメータのロードが「STAT_RUNTIME」で止まる現象が発生しました。今回はその対応を記載しておきます。 参考になったページはこちらです。 Mission planner ...
 電子工作
電子工作今回はJetsonNanoで動画を撮影する方法について紹介していきます。 JetsonNanoで動画を撮影する場合、以下のいずれかのカメラを使用することになると思います。 ①WEBカメラ(USBコードで接続) ②Rasp...
 電子工作
電子工作今回はJetsonNanoの電源として使えるモバイルバッテリーについて書いていきます。 現在JetsonNanoを使用してロボットを制作しており、そのときに問題になったのが電源です。 自宅のコンセントがある場所であればA...
 電子工作
電子工作今回はJetsonNanoとPCA9685を組み合わせたときに発生したエラーについてです。 PCA9685にはさらにサーボモーターを接続してこちらをサンプルプログラムで動かすところまで説明していきます。 PCA9685の...
 電子工作
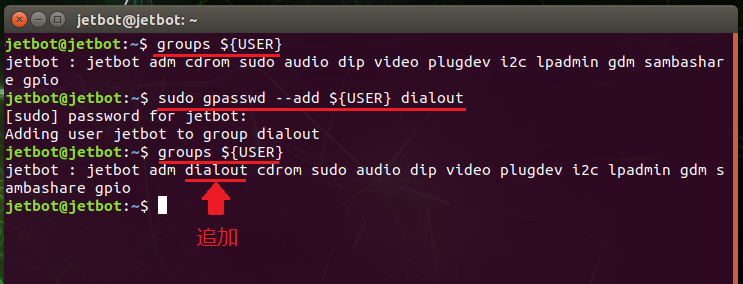
電子工作JetsonNanoのシリアルポートを利用するときに悩んだこと JetsonNanoのシリアルポートを利用して他のマイコンと通信するとき、起動するたびに以下のコマンドを実行して権限を与える必要がありました。 [crayo...
 電子工作
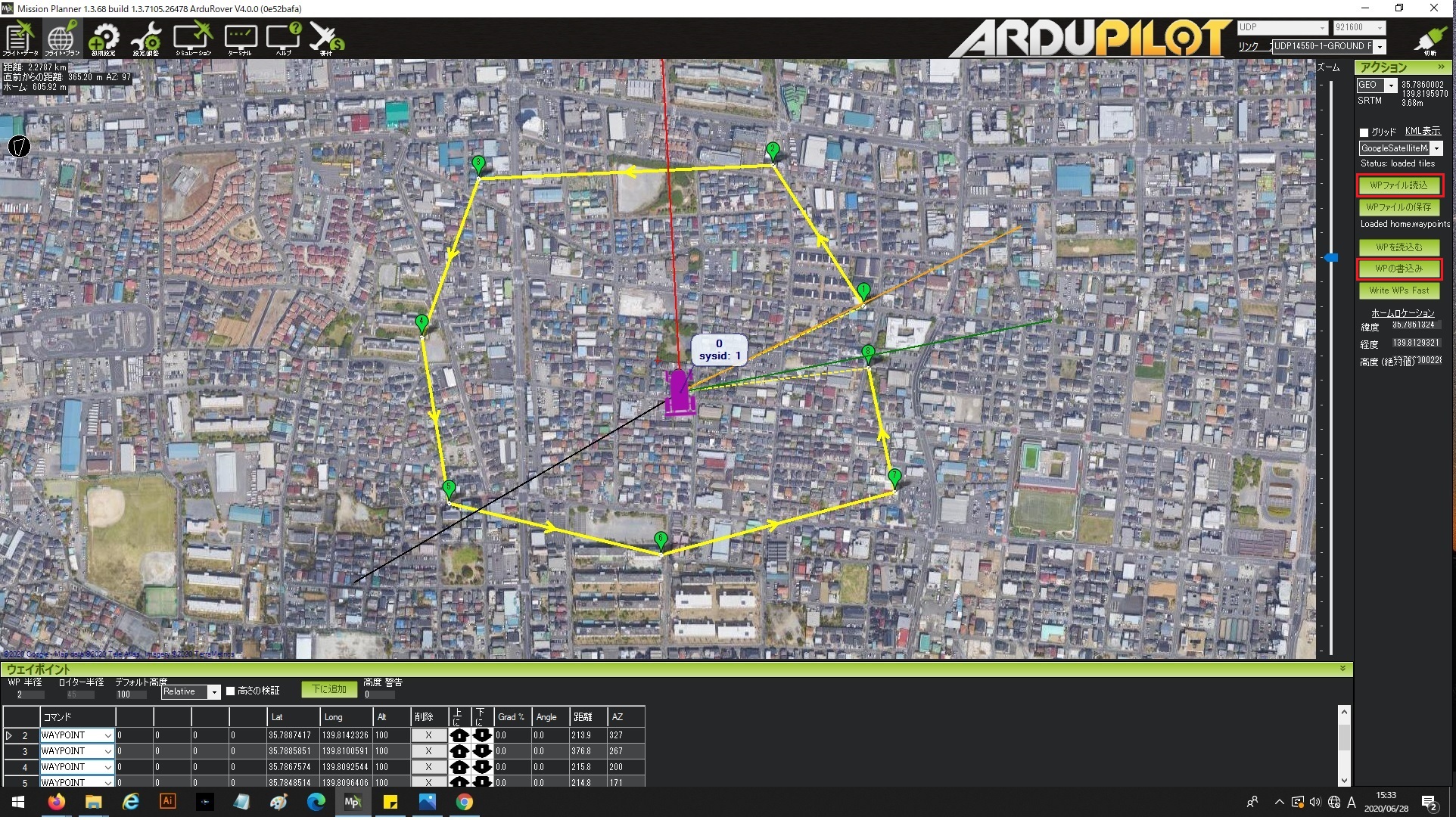
電子工作今回はPixhawkのRoverをクローラー形式にする方法について説明していきます。 通常、PixhawkでRoverをセッティングすると「スロットル」と「ステアリング」でRoverの自動運転の制御を行うことになると思い...
 電子工作
電子工作Roverの制作方法 今回使用したRoverの制作手順は以下の記事に記載しました。 pixhawkを設定してROSでRoverを動かす方法 上記で制作したRoverがこちらとなります。 Roverの自動運転を開始する手順...
 電子工作
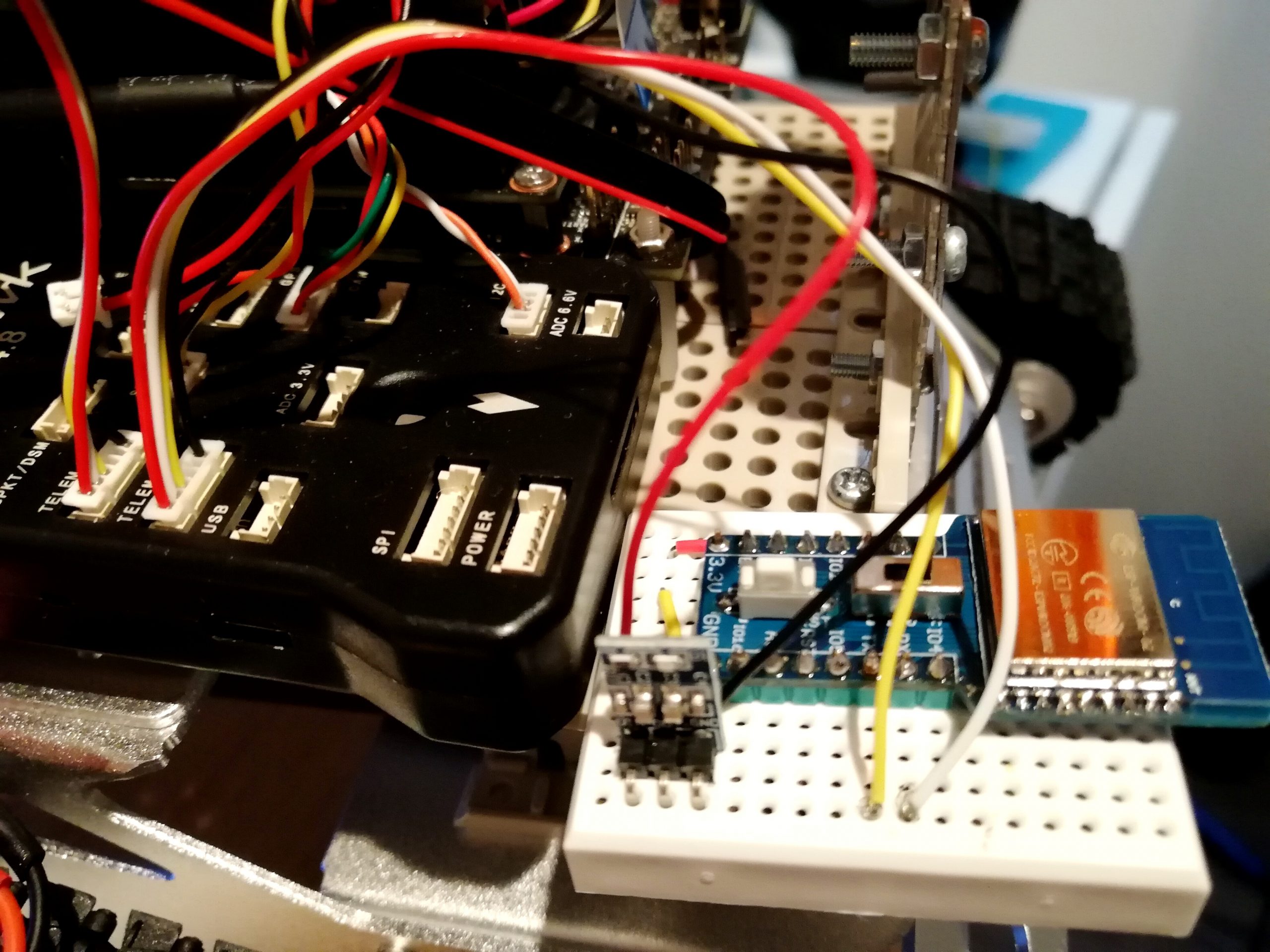
電子工作今回はpixhawkの無線通信をESP-WROOM-02で行ってみましたので、その備忘録を残しておきます。 参考にした記事 以下の記事を参考にしました。 本家のサイトの記事です。基本的にはこちらに記載されている内容の設定...
 電子工作
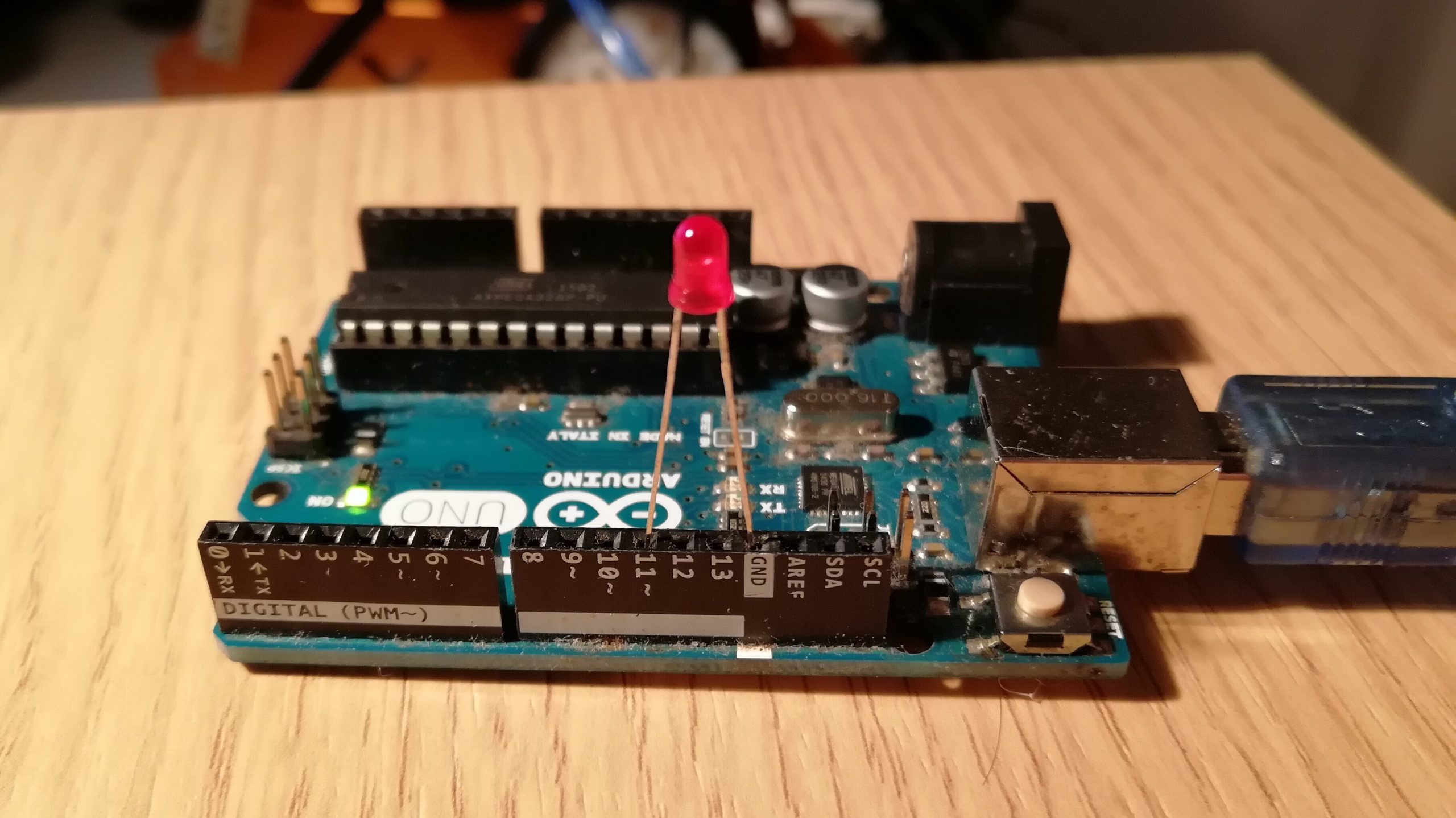
電子工作今回はJetsonNanoに入れたrosserialを使ってArduinoでLチカを行ってみましたのでその手順を残しておきます。 以下、目次の手順で実施していきます。 参考サイト 今回参考にさせていただいたサイトはこちら...
 電子工作
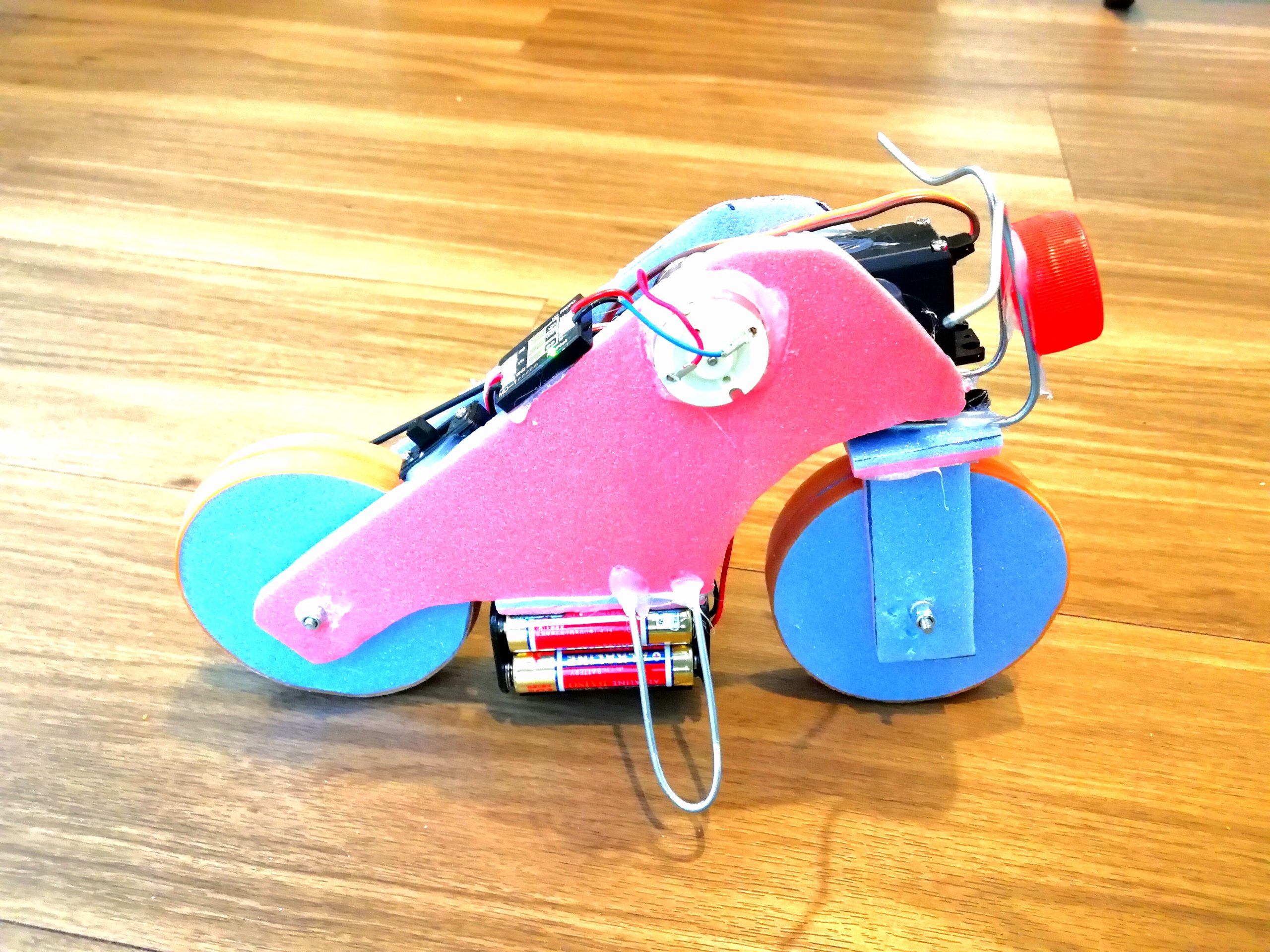
電子工作今回はダイソーのカラーボードでバイクのラジコンを作ってみましたのでそれの紹介をしたいと思います。 バイクラジコンに必要な材料 今回は以下の材料を使用しました。 ・ダイソーのカラーボード 450mm×300mm×厚さ5mm...
 電子工作
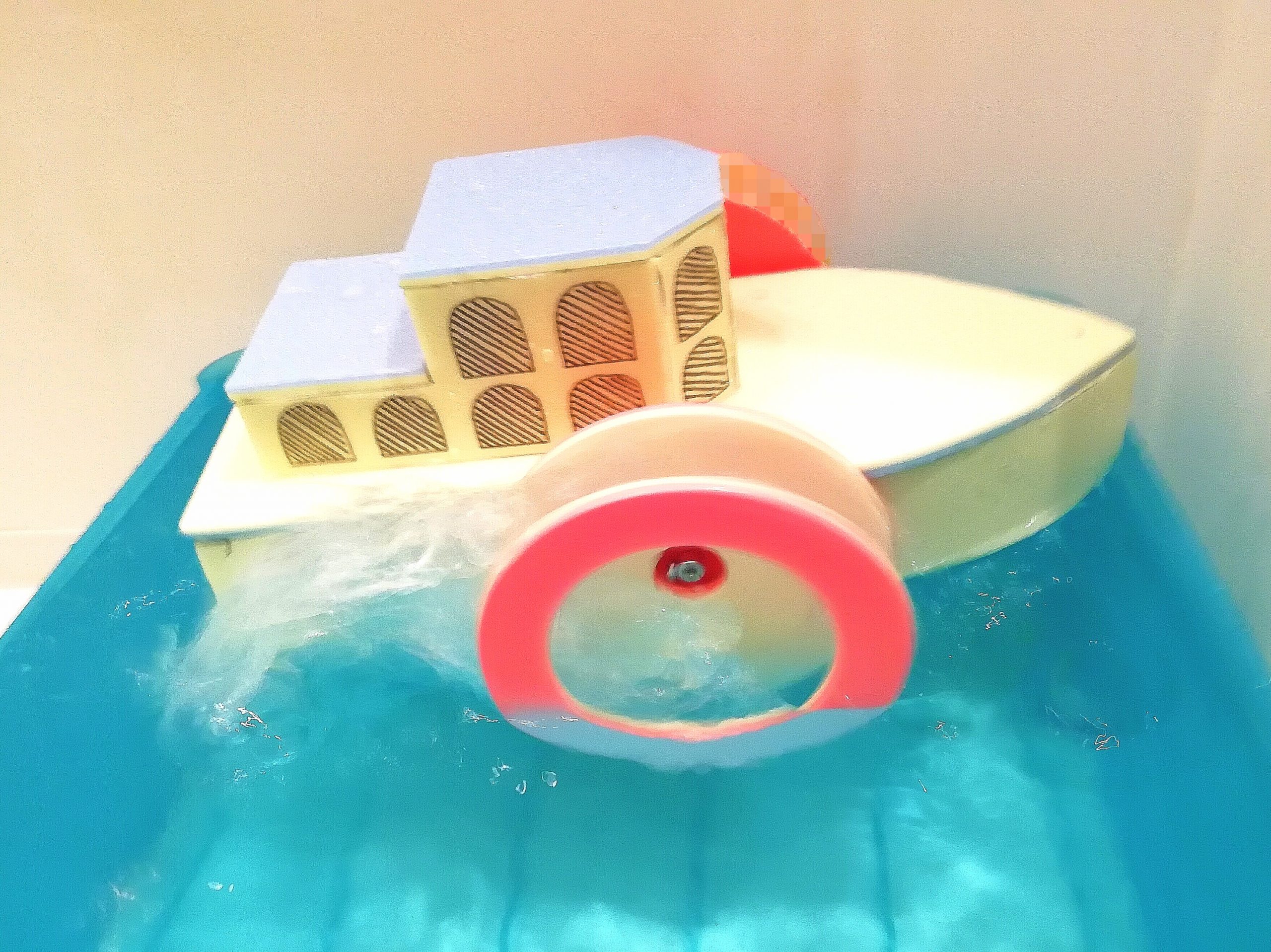
電子工作今回はダイソーのカラーボードでパドルシップを作ってみましたのでそれの紹介をしたいと思います。 パドルシップに必要な材料 今回使用した材料はこちらです。 ・ダイソーのカラーボード 450mm×300mm×厚さ5mm 3枚...
 電子工作
電子工作今回はダイソーのカラーボードを使ってラジコンボートを作ってみたいと思います。材料費はなるべく安くしたいですよね。なので100均で手に入るものを中心に材料を用意しました。 目次 1. 材料を用意する 2. 船底の形状を決め...
 電子工作
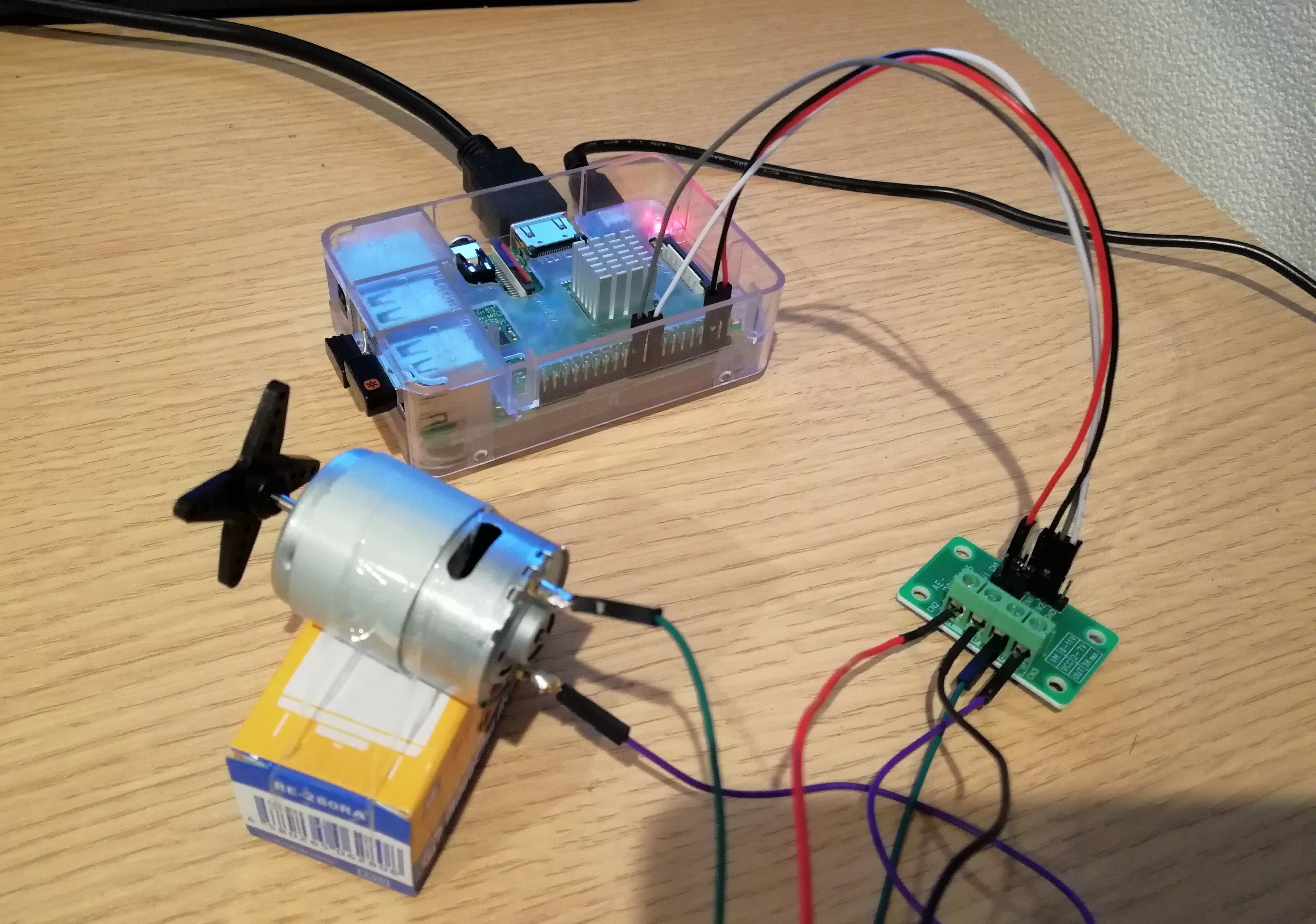
電子工作最近の電子工作の入門書ではRaspberryPiとDCモータドライブ「TA7291P」でDCモーターを動かすことが多かったのですが、DCモータドライブ「TA7291P」は生産終了してしまうという情報がありましたので、今回...
 電子工作
電子工作今回はMaker Faire Tokyo 2019 で出展していたコミュニティやサービスのリンク集をまとめました。 個人的に興味を持ったものだけを掲載しています。 ・IoT ALGYAN(あるじゃん) Io...
 電子工作
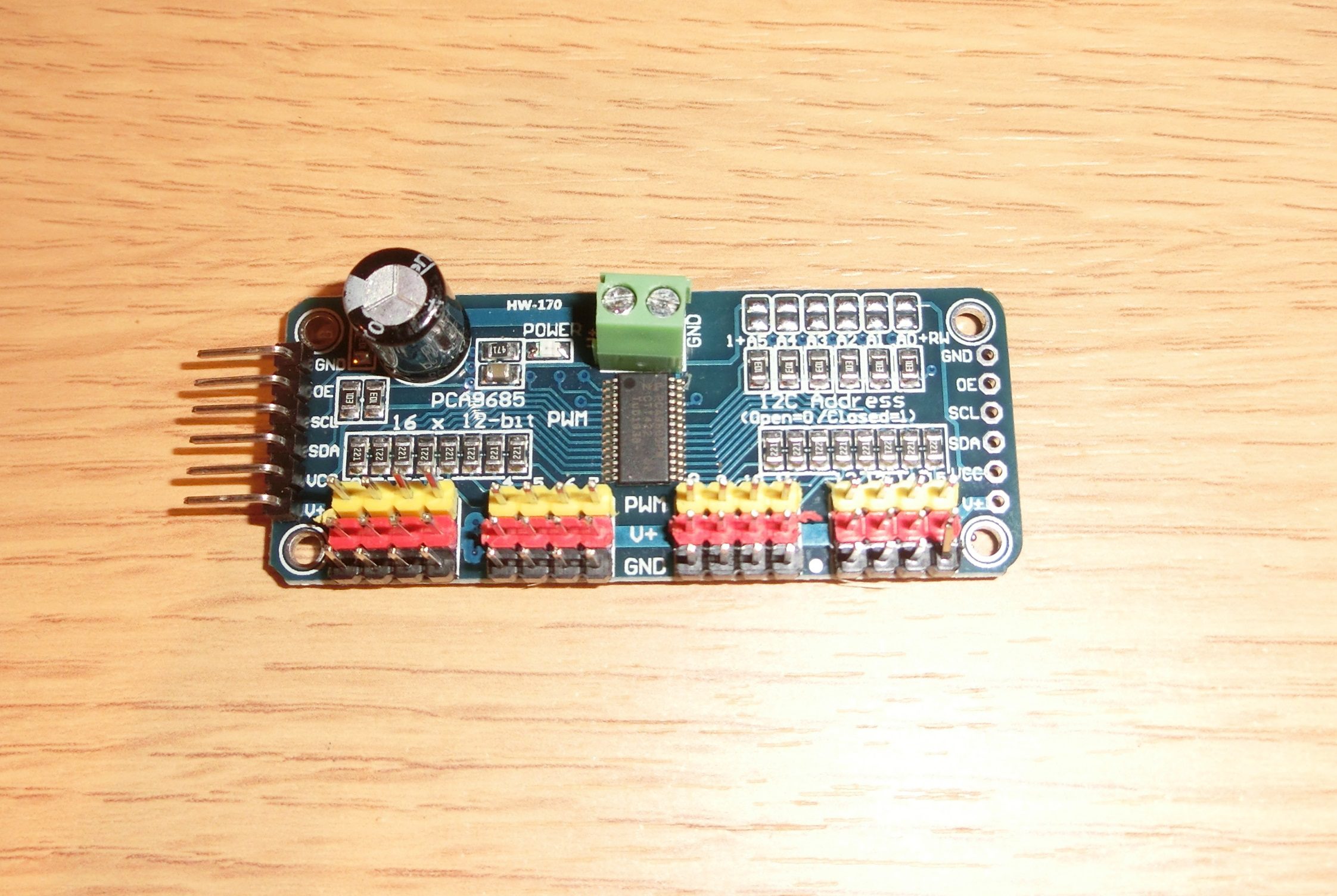
電子工作今回はRaspberryPiとサーボモータドライバのPCA9685でサーボモータを動かそうとしてみましたが、動かすことができませんでした。 その原因について色々と調査してみましたので、そのときのことを記録しておこうと思い...
 電子工作
電子工作前回と前々回までは「wiringpi」のソフトウェアPWMを使用していましたが、こちらの方法だとサーボモータがガタガタと振動してしまいました。それでは少し実用性に欠けるので、今回はハードウェアPWMを使用してサーボが振動...
 電子工作
電子工作今回はRaspberryPiとサーボモータでサインスマートの5軸ロボットアームを動かしてみましたので、そのときの情報を書いていきたいと思います。作ったロボットアームでボトルキャップチャレンジをやってみたときの様子がこちら...
 電子工作
電子工作前回の記事でRaspberryPiのサーボモータを無事動かすことができました。でもどうせなら計算式などを理解して自分でパラメータを変えたい!とか思ってかなり試行錯誤してみたのですが、内容を理解するのには苦労しました。 そ...
電子工作今回はブラウザのスライダーでRaspberryPiのサーボモータを動かしてみたいと思います。 使用するサーボモータはMG996Rです。情報もなかなか少ないので、備忘録も兼ねて記事にしていきます。 参考サイト 今回はこちら...

KAZUKIです。
モノづくりが好きで、ブログでは電子工作やゴミ回収ロボットのことを書いています。
その他雑記も書きます。興味のある記事がありましたら是非読んでみてください。
< Twitterプロフィール >
https://x.com/RoomKazuki