前回までの記事
こちらの記事を書く前には以下の記事のロボットを制作していました。以下の記事の内容が初期段階の取り組みです。課題が多く存在したため一から構想を練り直すことにしました。
海や川でゴミ回収できるRaspberryPiラジコンボートを作る
カゴを付けて保持力をアップさせてみた。
これぐらいのサイズがあればペットボトルの回収も問題なさそう。 pic.twitter.com/IdPam46Ivy— Kazuki (@RoomKazuki) September 23, 2019
ゴミ回収ロボットを開発しようと思った理由
近年、海洋プラスチック汚染が深刻化する中、海に流れ出すゴミを減らすための取り組みが世界中で加速しています。
そこで、私は「海をきれいにする」という強い思いから、ゴミ回収ロボットの開発に着手しました。具体的には、海岸線や河川に漂うゴミを自動で回収し、海洋への流出を抑制することを目指しています。
日本において、このようなロボットはまだ一般的ではありません。しかし、技術の進歩と環境問題への関心の高まりを背景に、私自身もこの開発を通じて社会に貢献したいと考えています。
海外の取り組み
海外では、すでに多くの団体が海洋プラスチック問題に取り組んでいます。中でも、「オーシャン・クリーンアップ」は、大規模な海洋清掃プロジェクトとして注目を集めています。彼らの活動は、私にとって大きな刺激となり、ロボット開発のモチベーションを高めてくれました。
実際にロボットを開発してみると、海洋ゴミ問題のリアルな課題が数多く見えてきます。
まずは、このプロトタイプで実証実験を行い、課題を明確化していく予定です。
どのようなゴミ回収ロボットを作るか?
水面に漂うゴミを効率的に回収するため、新たなロボットの開発に着手しました。長考の末、双胴型アーム式回収ロボットというコンセプトにたどり着きました。
なぜこの形状なのか?
- 安定性と機動性の両立: 双胴構造にすることで、水上の安定性を確保しつつ、ラジコンボートの機敏な動きを利用し、広範囲をカバーできる設計としました。
- 効率的なゴミ回収: 中央に配置したアームにより、水面に浮遊する様々なサイズのゴミをピンポイントで捕獲し、回収容器へとスムーズに移送できます。

ゴミ回収ロボットの構成を具体的に考えてみた
ゴミ回収ロボットの構成をさらに具体的に考えてみました。
遠隔操作と自動運転の融合
- 遠隔操作:
- 高精度のカメラ映像を基に、岸からリアルタイムでロボットを操作し、複雑な状況に対応できるようにします。
- 自動運転:
- GPS情報を活用し、事前に設定されたルートを自律的に走行させます。
- 障害物検知センサーとAIによる画像認識を組み合わせることで、周囲の状況を把握し、安全に走行できるようにします。
- 特定のゴミを認識し、自動で回収する機能も実装します。
エッジコンピューティングとAIによるゴミ認識
- エッジコンピュータ:
- ロボット本体に高性能なコンピュータを搭載し、リアルタイムで画像処理やAIによる判断を行います。
- ネットワーク環境に依存せず、自律的な動作を可能にします。
- AIによるゴミ認識:
- 深層学習を用いて、様々な種類のゴミを正確に識別できるAIモデルを開発します。
- カメラ映像からゴミの種類、サイズ、形状などを特定し、最適な回収方法を選択します。
ゴミ回収ロボットの試作
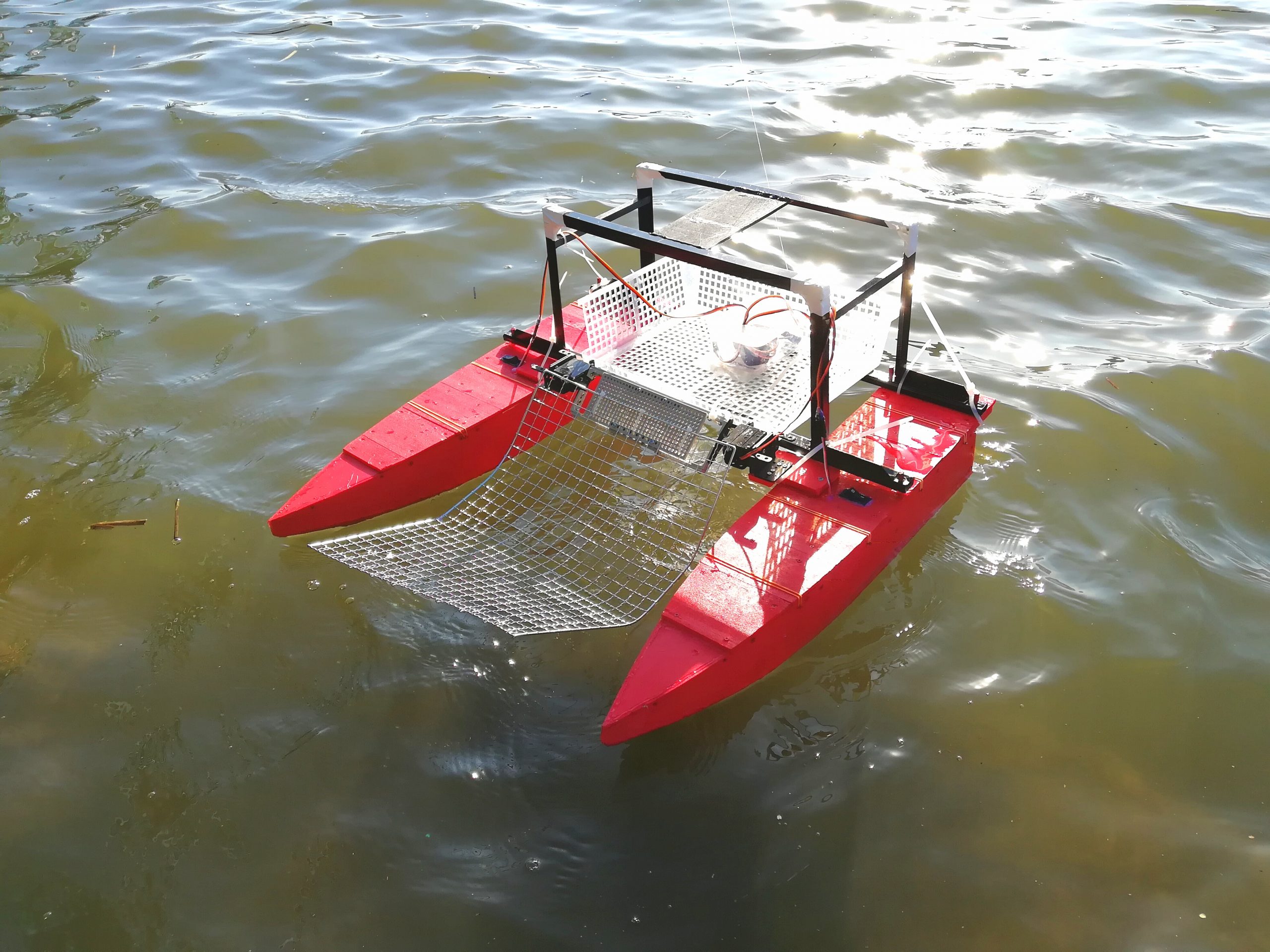
今回は、100円均一ショップのダイソーで手に入る材料を使って、ゴミ回収ロボットを自作してみました。
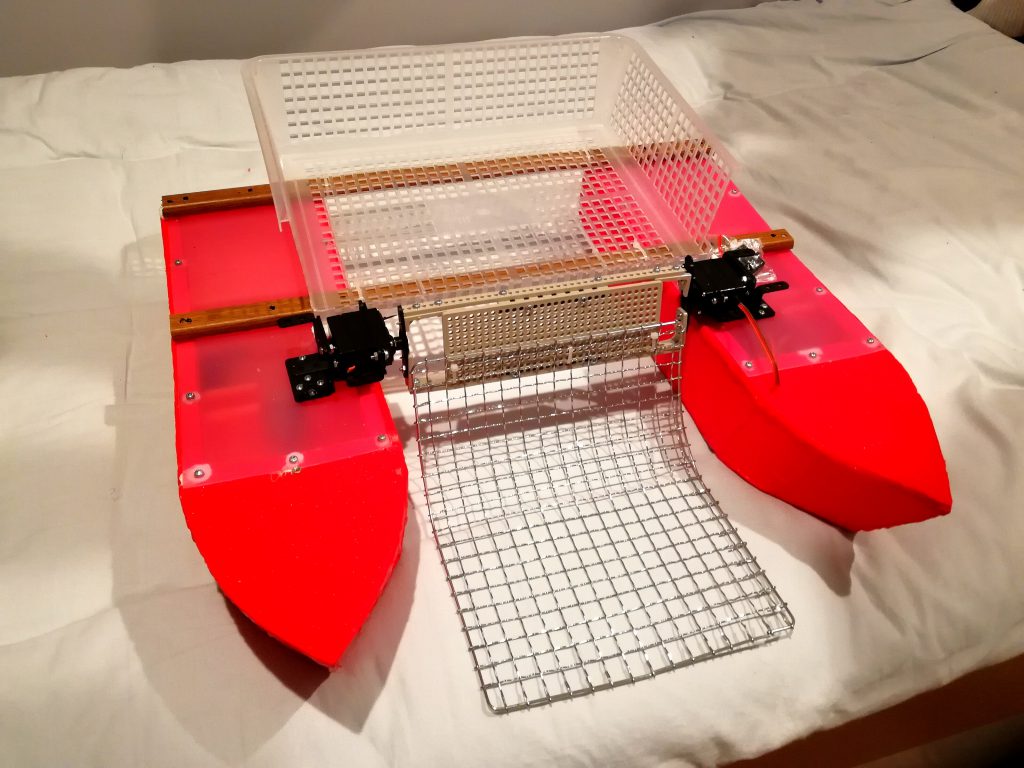
まずは、船体となる部分です。ダイソーのカラーボードを組み合わせて、両側にボートを配置しました。これにより、水上で抜群の安定性を確保できました。さらに、スクリューを2本設置することで、自由自在に旋回できるようになりました。
船体の中央には、サーボモーターを取り付けてゴミ回収アームを設置しました。このアームが、水に浮いているゴミをキャッチします。
荒川で実証実験
完成したロボットを、実際に荒川で試運転してみました。結果は上々でした。予想以上に安定して水に浮かび、浸水する心配もありませんでした。浮力にも余裕があり、様々な種類のゴミを回収できることを確認できました。
実験結果
- ペットボトル回収:100%の回収率を達成しました。
- その他のゴミ:カラーボールやピンポン玉なども、問題なく回収できました。
- 課題:ゴミがカゴの中に入らず、ボートの上に乗ってしまうことが何度かありました。カゴの構造やアームの動きを見直す必要があります。
ゴミ回収ロボットの機能向上
ゴミ回収ロボットの開発を進める中で、単なるゴミ回収だけでなく、より高度な機能の実現が不可欠だと感じています。
- 遠隔操作機能: 複雑な環境下での作業や、より迅速な対応を可能にするため、遠隔操作機能の開発を進めています。
- ゴミ認識機能: 水面生物を誤って回収してしまうことを防ぐため、ゴミ認識AIの開発に力を入れています。
- 自動運転機能: 将来的には、自律的にゴミを回収できるよう、自動運転機能の実装を目指しています。
試作機による実験を通して、これらの機能の改良点が見えてきたため、順次改良を進めていく予定です。
ゴミ認識AIの開発
ゴミ回収ロボットに搭載するゴミ認識AIの開発も並行して進めています。深層学習を用いた物体検出モデルであるYOLOを採用し、独自データを活用することで、より高精度なゴミ認識を目指します。
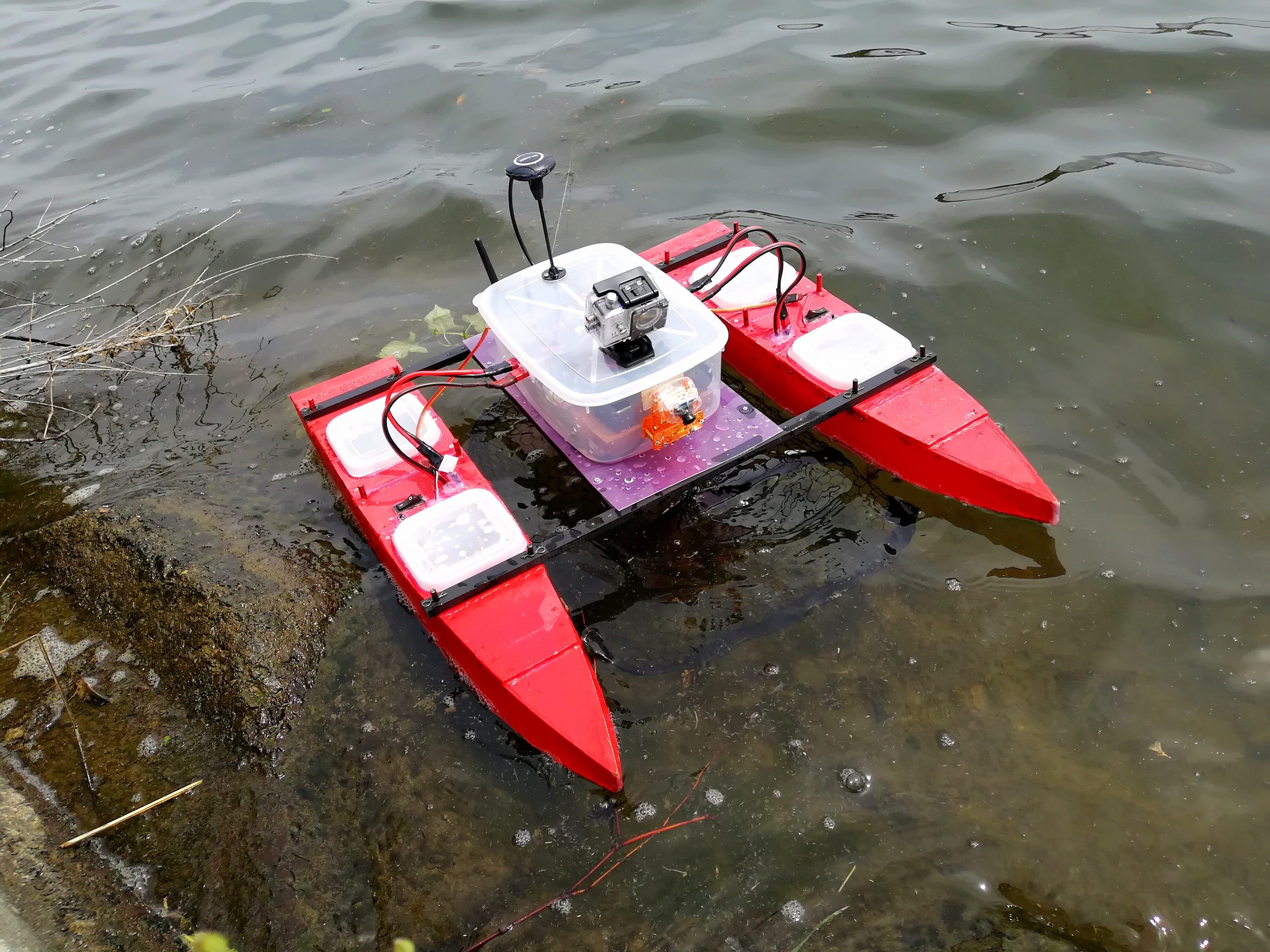
ボートの改良
初期の試作機で使用していたダイソーのカラーボード製のボートは強度が不足していたため、木材製のボートに作り替えました。サイズも拡大し、よりスタイリッシュなデザインとなりました。今後は、この改良されたボートを用いて、様々な実験を繰り返していきます。
木製ラジコンボートを2船作りました。これから塗装してしまうので綺麗な木目はこれで見納めです。
土日は塗装からの仕上げを行います。 pic.twitter.com/tR5FD2i8cR
— Kazuki (@RoomKazuki) March 12, 2020
改良版のロボットで試走してきました
改良版が仕上がりましたので川に行って試走してきました。木材で作り直したボートの操作性を確かめるためです。 一部破損してしまいましたが、それ以外は順調に走行してくれました。
改良版ロボットの試走結果
木材製のボートに載せ替えた改良版ロボットの試走を行い、以下の結果を得ることができました。
- 操作性: 木材製のボートは、以前のカラーボード製に比べて耐久性があり、安定した航行が可能であることを確認しました。
- 耐久性: 試走中に一部破損箇所が発生しましたが、全体的な構造は安定しており、今後の改良点として設計の見直しを行う予定です。
自動運転の導入
ラジコンのように操作することもできますが、今回は自動運転できるようにしていきたいと考えています。ドローンのフライトコントローラー、Jetson Nano、Webカメラといった構成で自動運転を実現を目指します。

道なりにあるペットボトルを回収するところまではできました。カメラの視野がまだまだ狭い感じがしますね。 pic.twitter.com/oRv93HnCSE
— Kazuki (@RoomKazuki) August 1, 2020
今日も公園で検証しました。今回は探索しながらゴミの位置をロボットに覚えさせてその方向に進むようにしてみました。 pic.twitter.com/rAsdYXRGTi
— Kazuki@固ツイの活動してます (@RoomKazuki) November 13, 2021
ロボットで5m×5m四方のゴミ回収チャレンジ動画です。(途中10倍速)
自動モードで5本のペットボトルの回収に成功しました。
わりと安定して動いてくれるレベルになってきました。 pic.twitter.com/nVMQF9gLvH— Kazuki (@RoomKazuki) April 23, 2022
多摩川で自動運転の検証
地上用のローバーで自動運転のノウハウを取得することができたので、
2021年からは実際に多摩川でゴミ回収ロボットを動かして検証しています。
自動運転で帰還するシーンです pic.twitter.com/HkJfLpttpz
— Kazuki (@RoomKazuki) March 28, 2021
今日はこの1kmコースを2周させることができました。ようやく成果がでてきたなという感じです。 pic.twitter.com/sfveXZEoAD
— Kazuki (@RoomKazuki) May 29, 2021
今日は川に浮かんでるペットボトルを回収する模擬練習をしてきました。 pic.twitter.com/oqiAnO6p9I
— Kazuki (@RoomKazuki) June 19, 2021
海のお掃除プラントロボット夢コンテストに参加
先日はTwitterのフォロワーさんから教えていただいたコンテストのほうに参加させていただきました。
大変ありがたいことに「Sea Cleaning賞」を受賞することができましたので、これまで以上に頑張っていこうと思います。
ご報告があります。
本日開催された「海のお掃除プラントロボット夢コンテスト」で「Sea Cleaning賞」を受賞しました。受賞できたのは@De2_trash_rush さんのおかげです。また日々活動を応援していただいているフォロワーの皆さま、心より御礼申し上げます。 pic.twitter.com/XyrkCAyNlA— Kazuki@固ツイの活動してます (@RoomKazuki) November 3, 2021
リニアガイドレールの開発
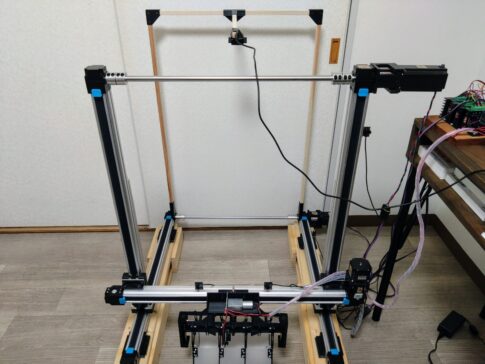
2023年は、XYZ方向のリニアガイドレールを使用した高精度なゴミ回収ロボットの開発を進めています。 このロボットは、カメラでゴミを認識し、リニアガイドレールによってアームを正確に移動させ、吸着盤や掴み手でゴミを掴み回収します。 高速かつ高精度な動作により、様々な形状や大きさのゴミを効率的に分別回収することを目指しています。
現在、リニアガイドレールとロボットアームの連携に関するシミュレーションと試作を繰り返し、目標とする動作を実現するための調整を進めています。また、様々な種類のゴミを正確に認識するための画像認識技術の開発にも力を入れています。
今日もペットボトルと空き缶の自動回収を試してみました。右上はリニアガイドの上部に取り付けたWebカメラの映像です。
なるべく色んな形状・大きさのものを回収できるようになればいいなと思っています。 pic.twitter.com/546036yRmm— Kazuki (@RoomKazuki) March 28, 2023
台形制御を導入したりArduinoの処理を最適化したりしました。防振ゴムで騒音対策もやってみましたがまだまだうるさいですね。。 pic.twitter.com/LZIamNCb0K
— Kazuki (@RoomKazuki) October 5, 2024
今後の予定
ゴミ回収ロボットの開発は、まだ始まったばかりですが、海のごみ問題解決という大きな目標に向かって、着実に歩みを進めています。 今後は、海洋ゴミの多様化に対応し、様々な海域で活躍できるロボットを目指していきます。
進捗状況は、このブログで随時お伝えしていきますので、ぜひご注目ください。