まずは部品を調達する
Arduinoとタミヤのリモコン・インセクトを使用して動き回るロボットを作成しました。
主に必要な部品は以下の感じでした。
・タミヤ ロボクラフトシリーズ No.7 リモコン インセクト 71107
・タミヤ ユニバーサルプレート
・Arduino Uno
・DCモータドライブIC
・抵抗
・積層セラミックコンデンサ
・タクトスイッチ
・ブレッドボード
詳細は「Arduinoでロボット工作をたのしもう!」をご参照ください。
インセクトロボットの本体を組み立てる
インセクトロボットの組み立てはタミヤの組み立て手順書に従って行います。
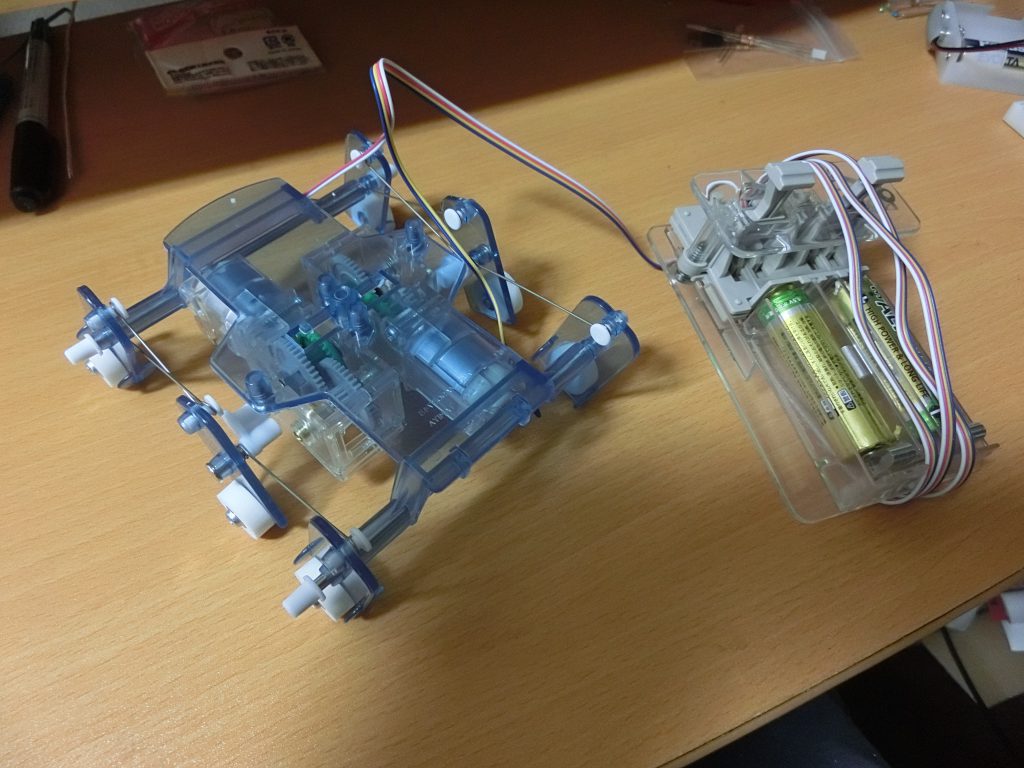
ロボットを組み立てるとこんな感じになります↓
インセクトロボットの組み立てが完了したとき

制御回路を作成する
次に制御回路の制作に取り掛かりました。
本には、ロボットの制御回路図と実体配線図が載っているため、回路を理解するときには「制御回路図」、実際にブレッドボードに配線するときには「実体配線図」を参考にすると分かりやすかったです。ここでも、本の内容にそって正確に正確に配線をしていくことがポイントです。
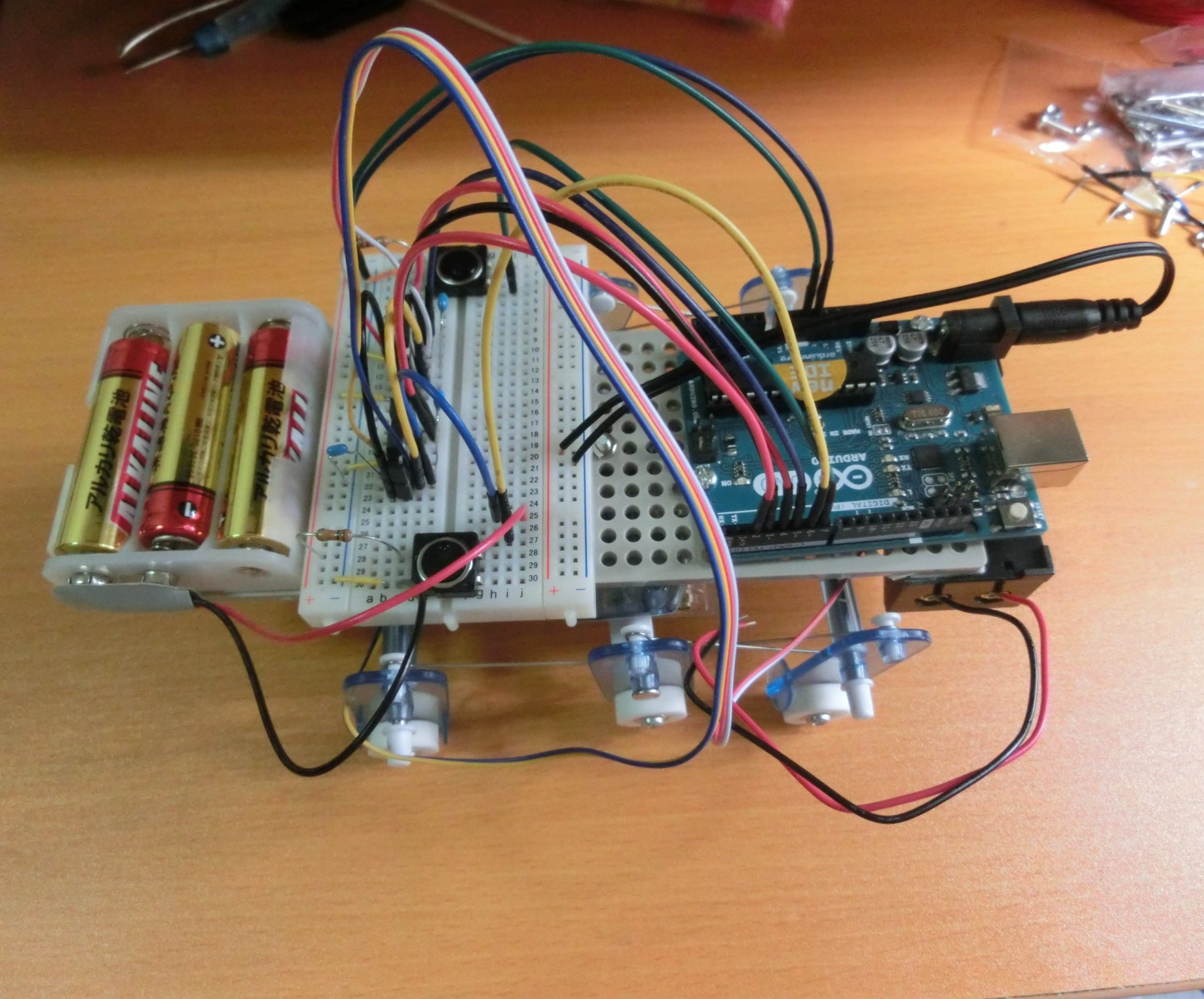
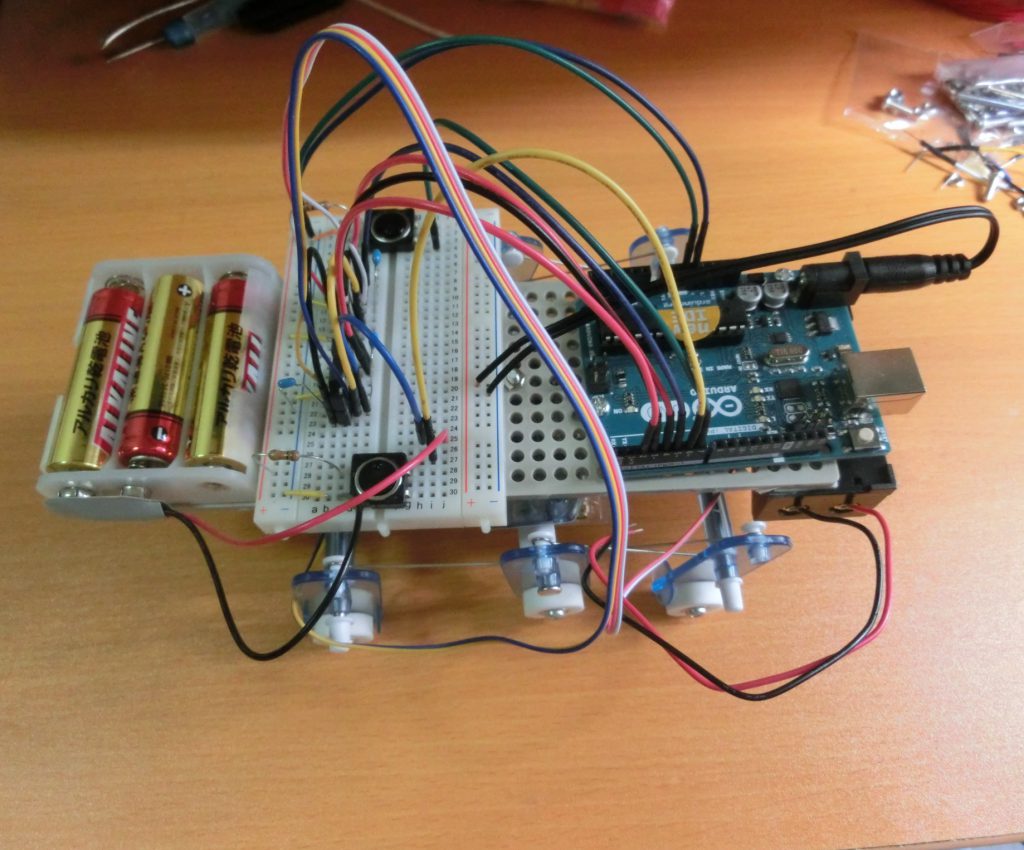
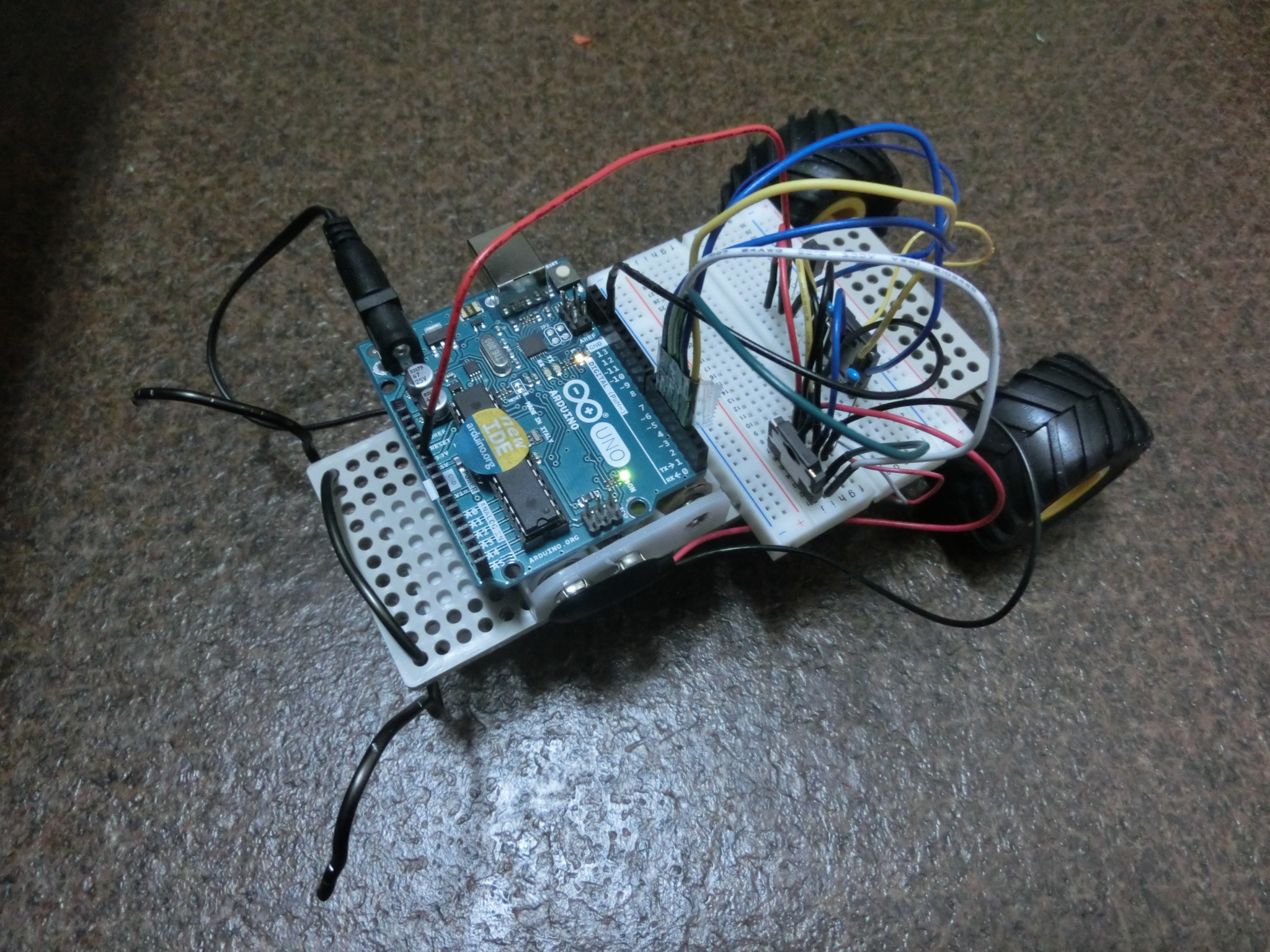
回路が出来上がり、ロボット本体に取り付けるとこんな感じになります。↓
Arduinoのプログラムを組んでいきます
ArduinoをUSBポート経由でパソコンに接続し、専用のソフトウェアで本の通りのプログラムを組んでいきます。
これも本の通りに入力していくだけです。
今回もArduino専用の関数を使用してプログラムを組んでいきます。
今回は2つのボタンの入力値を判定することでロボットの動きを操作するプログラムになっていました。
関数の「delay();」はミリ秒単位でロボットの動きを決定できるため、本に載っている時間とあえて大きな時間を設定してみるとロボットがどのような動きになるか分かりやすいと思います。
自由に走り回るロボット




コメントを残す