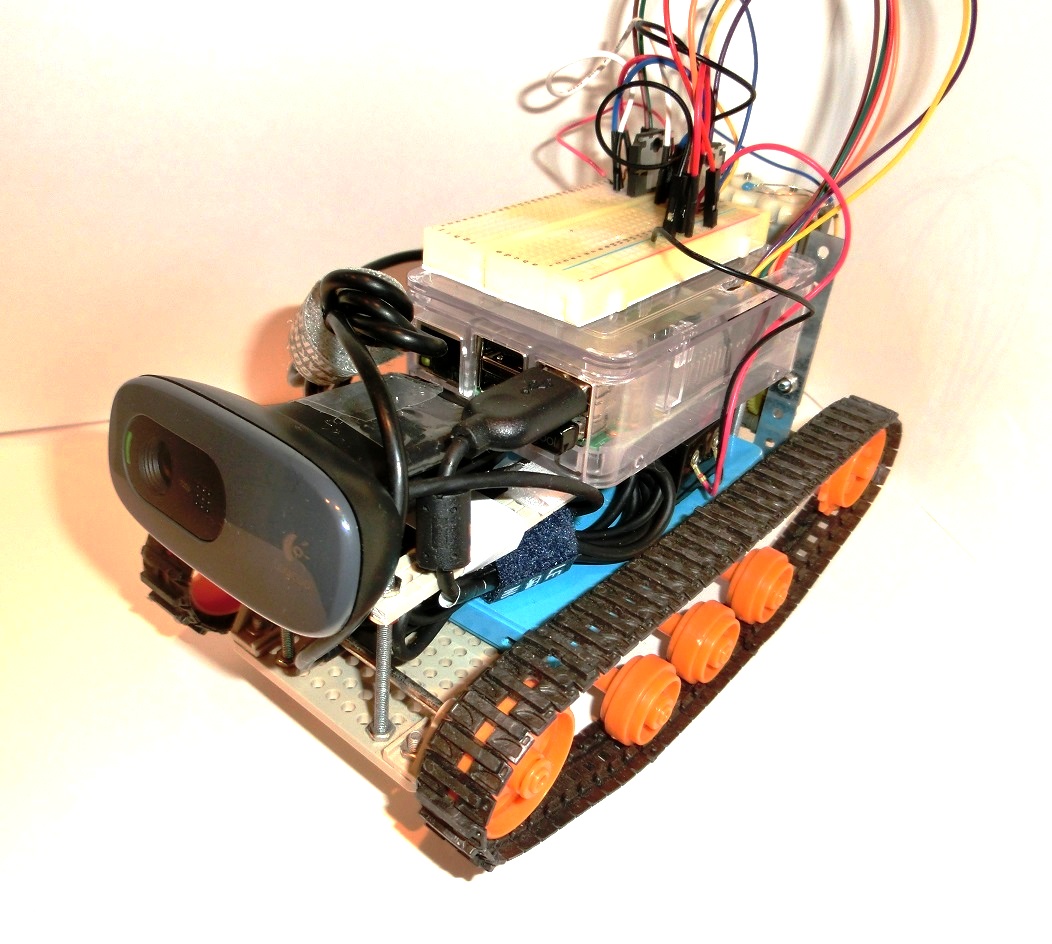
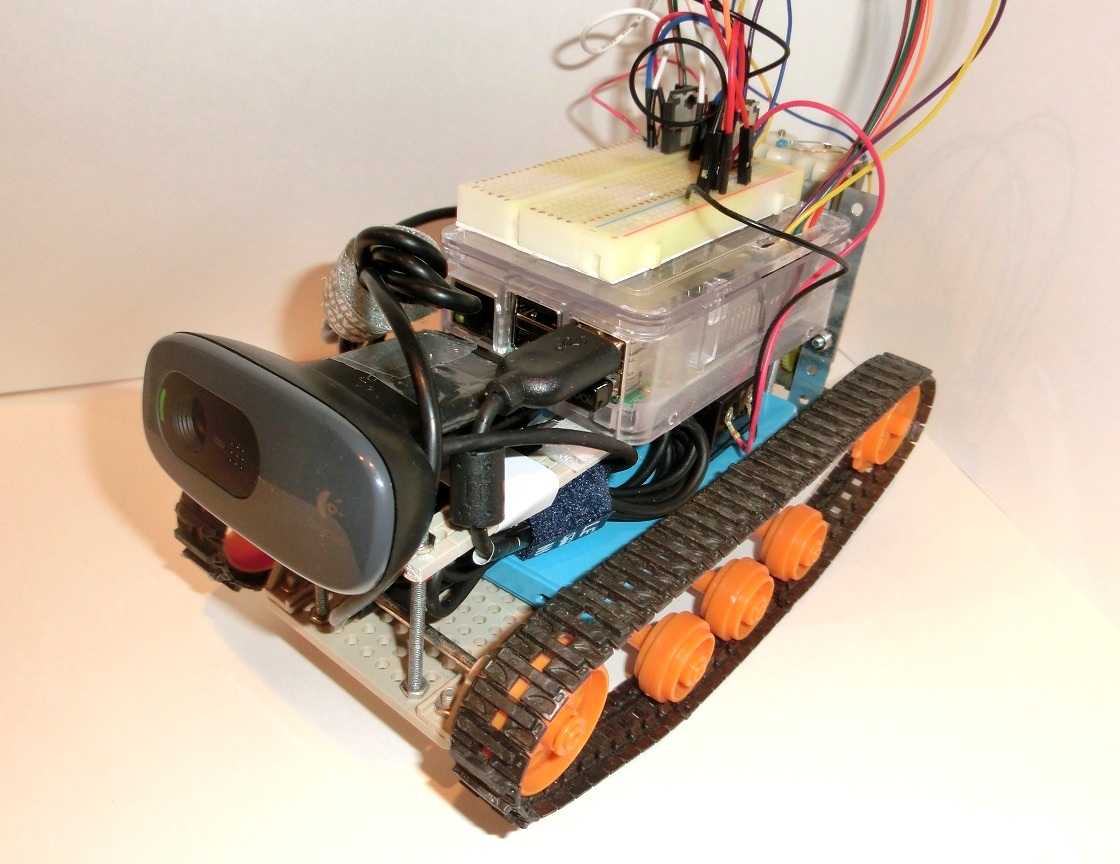
 今回はRaspberry PiでWebから操作できるラジコンクローラーを作る方法をご紹介したいと思います。 昨年はArduinoを使用してラジコンを作成しました。それを今回はRaspberryPiで作り直してみました。
今回はRaspberry PiでWebから操作できるラジコンクローラーを作る方法をご紹介したいと思います。 昨年はArduinoを使用してラジコンを作成しました。それを今回はRaspberryPiで作り直してみました。
昨年の記事はこちら↓
ArduinoとXBeeとNode.jsを使用してWeb画面からラジコンを操作できるようにしてみた!
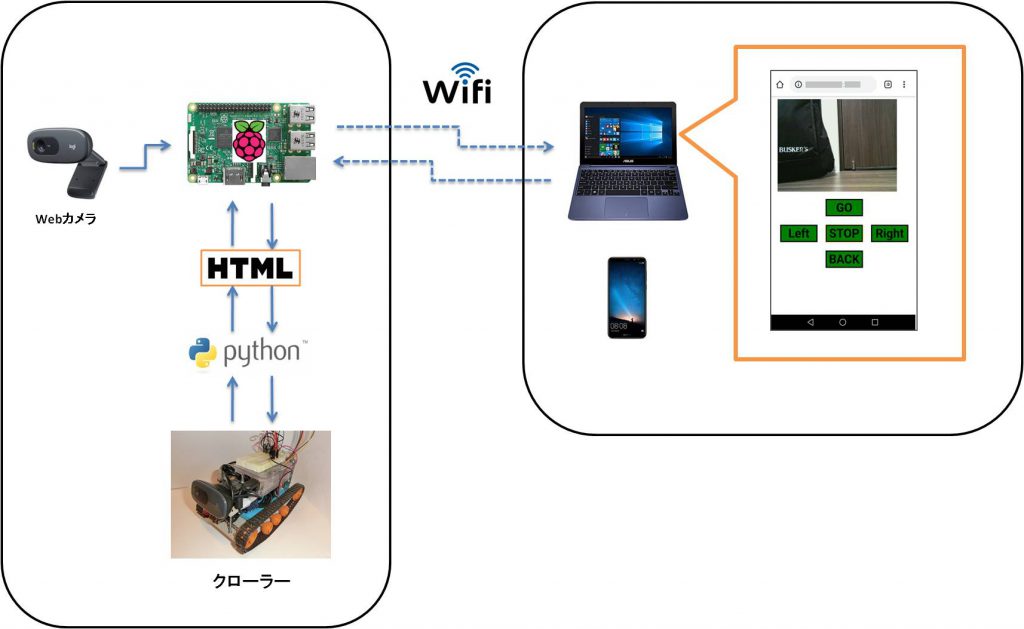
大きな変更点としては、Webカメラの映像を操作画面に表示できるようになったことと、シリアル通信ではなくWebサイトから直接ロボットを操作できるようになったため、通信で使用していたXBeeが不要になったところが大きいです。
実際に動かしてみたときの様子がこちらです。
今回の概要図
以下に作成手順を紹介していきます。
必要な材料を用意する
今回は以下の材料を用意しました。
本体部分
| 部品名 | 個数 |
| Raspberry PI3 modelB | 1 |
| Webカメラ 「HD ウェブカメラ C270」 | 1 |
| タミヤ トラック&ホイールセット | 1 |
| タミヤ ツインモーターギヤーボックス | 1 |
| タミヤ ユニバーサルプレート | 1 |
| タミヤ ロングユニバーサルアームセット | 1 |
| タミヤ ユニバーサル金具 4本セット | 1 |
| マジックテープ | 1 |
| ネジ M3 x 50mm | 4本 |
回路部分
| 部品名 | 個数 |
| ブレッドボード | 1 |
|
DCモータドライブ「TA7267BP」もしくは「TB6643KQ」 ※どちらかを2個入手できればOKです |
2 |
| ジャンパーワイヤ | 15本 |
| 電池ボックス 9V型 | 1 |
| モバイルバッテリー | 1 |
| 両面テープ | 1 |
モーターと銅線の接続部分
| 部品名 | 個数 |
| ハンダ | 1 |
| 積層セラミックコンデンサ「0.1μF 50V」 | 2 |
工具
| 部品名 | 個数 |
| +ドライバー | 1 |
| ハンダごて | 1 |
Raspbian(Jessie)のインストール
RaspberryPiのOSにはRaspbian(Jessie)をインストールしておきます。後述で記載するRaspberry Piをアクセスポイント化して操作する場合にはRaspbianのJessieでないと方法を確立することができなかったためです。 今回は「Raspberry Pi3 Model B」に「NOOBS_v2_4_1」で「Raspbian Jessie」をインストールした前提で以下の手順を実施していきます。(※Raspberry Pi3 Model B+にもNOOBS_v2_4_1を入れようとしてみましたが、インストールできませんでした。B+に上記のOSは入れられないかもしれません。。)
WebIOPIのインストール
まずはWebIOPIをインストールします。これをインストールするとブラウザからRaspberryPiのGPIOを操作することが可能となります。インストール方法については別の記事にまとめましたのでこちらをご参照ください。
WebIOPIをRaspberry Piにインストールする方法
RaspberryPiを起動するとWebIOPIも同時に起動するように設定しておきます。
Mjpg-Streamerのインストール
今回はRaspberryPiに設置したWebカメラ映像を操作画面に表示するために「Mjpg-Streamer」を使用しますので以下の記事に沿ってインストールしておきます。「Mjpg-Streamer」はRaspberryPiの起動時に同時に起動するように設定しておきましょう。
RaspberryPiとMJPG-Streamerでライブストリーミングをする方法
※以降は有料部分となります。この有料部分にも時間をかけたからこそ分かるノウハウを書いています。更新するたびに販売価格を上げていくことも検討致します。
ご購入していただいた皆様、誠にありがとうございました。




200円支払って有料記事が表示されるようになったのですが、
index.htmlの部分が表示されていません。
対応をお願いいたします。
湯川さん
ご指摘ありがとうございます。
またご返信が遅くなり申し訳ありません。
記事を修正しましたのでご確認お願い致します。