いもむし型ロボットの部品を制作する
今回は多関節ロボットの制作を行いました。多関節ロボットを組み立てるにあたって、
ロボットのフレームを組み立てる必要がありましたので、「DMM.make AKIBA」に行ってフレームを製作しました。
「DMM.make AKIBA」には本当にいろんな工作機械があって、大抵のロボットの部品は製作することができるのではないかと思います。
まずは部品を調達します
まずはロボットを作るのに必要な部品を秋葉原にて調達しました。
行ったお店は「秋月電子」と「千石電商」と「ツクモロボット王国」です。
主に必要なのは以下の部品でした。
・RCサーボ(型番:TA7267BP)×4
・測距モジュール(型番:GP2YOA21YK)×1
・抵抗
・積層セラミックコンデンサ
・タクトスイッチ
・ピンヘッダ
・DCジャック
・ユニバーサル基板
・タミヤ ユニバーサルプレート
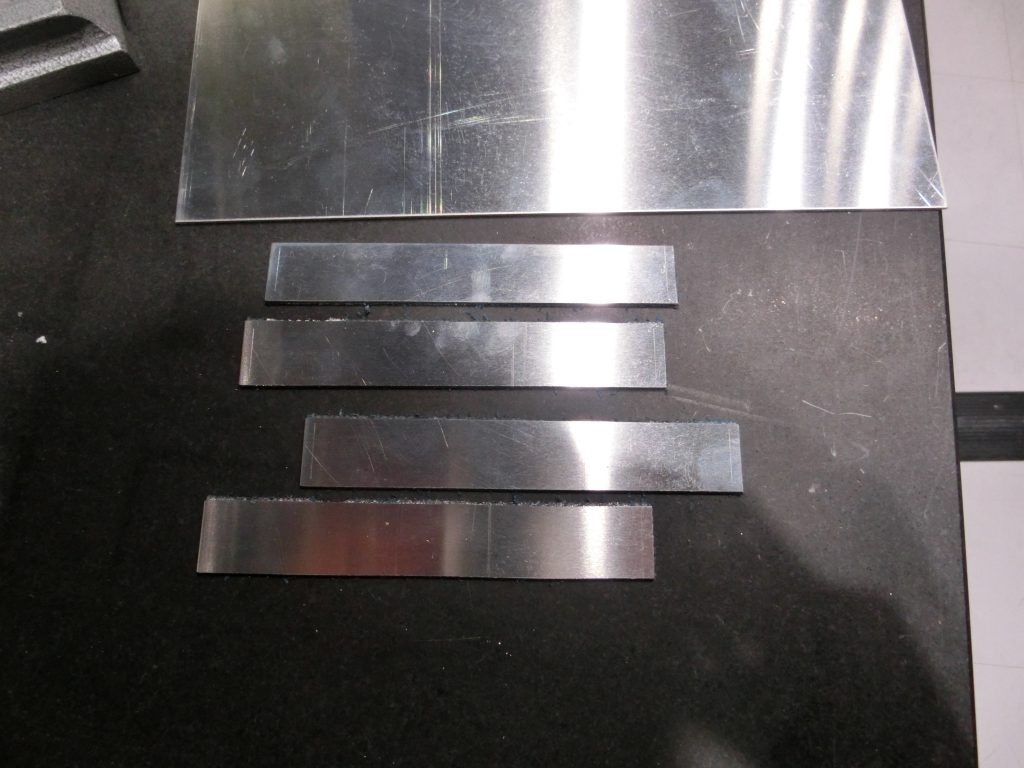
・アルミニウム板(厚さ1.2mm)
アルミニウム板はなかなか見つかりませんでしたが、「ツクモロボット王国」でちょうどよいサイズのものを見つけることができました。

フレームの部品をそれぞれ作るためにアルミニウム板からフレームを切り出します。
本に記載されている寸法を見ながら、ハイトゲージでフレームの外寸法をケガキます。
ハイトゲージでケガキをする

フレームの外形線のケガキ線

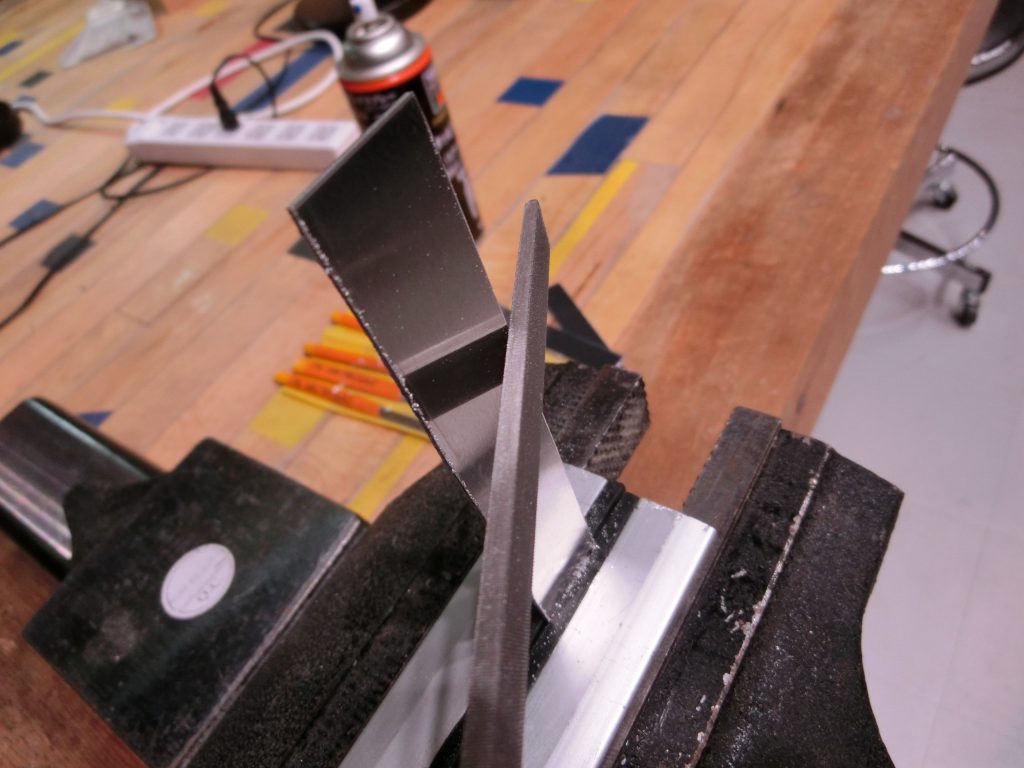
フレームを部品ごとに切り出したとき
切り出したフレームのバリをヤスリで落としていきます
ハイトゲージで穴寸法をけがき、交点にポンチを打っていきます
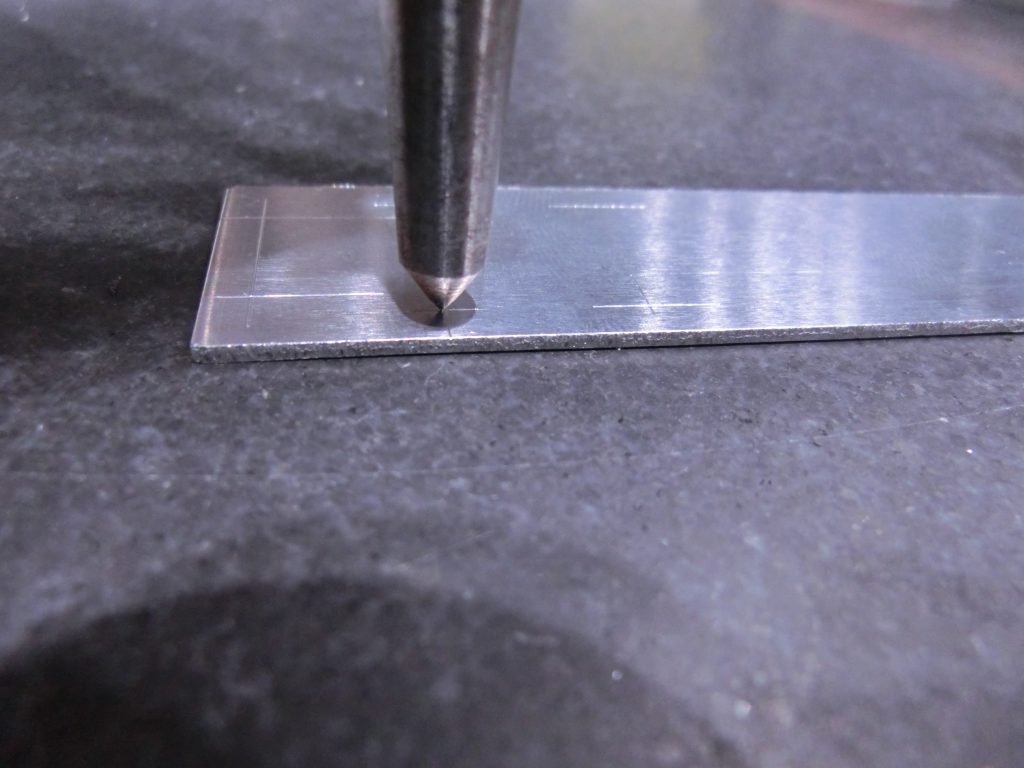
ポンチを打ち終わったらこんな感じになります
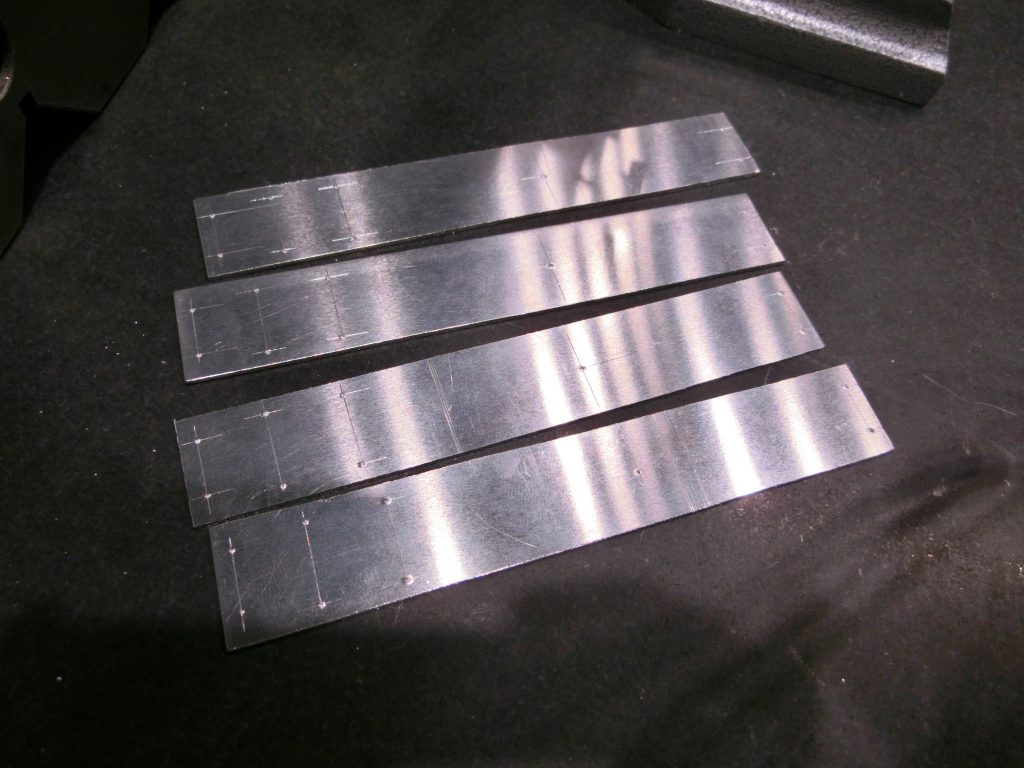
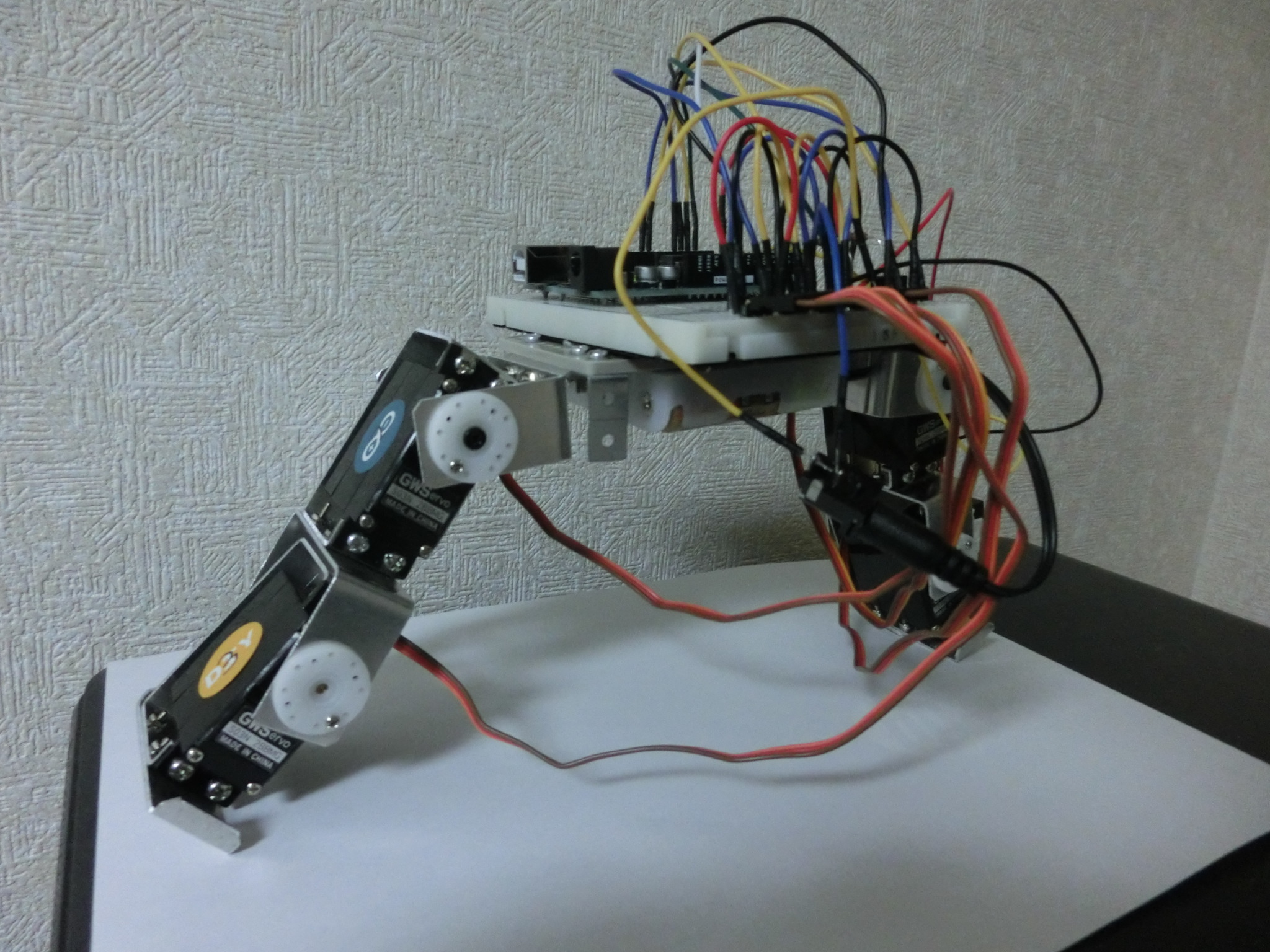
フレームが出来上がったときはこんな感じになります

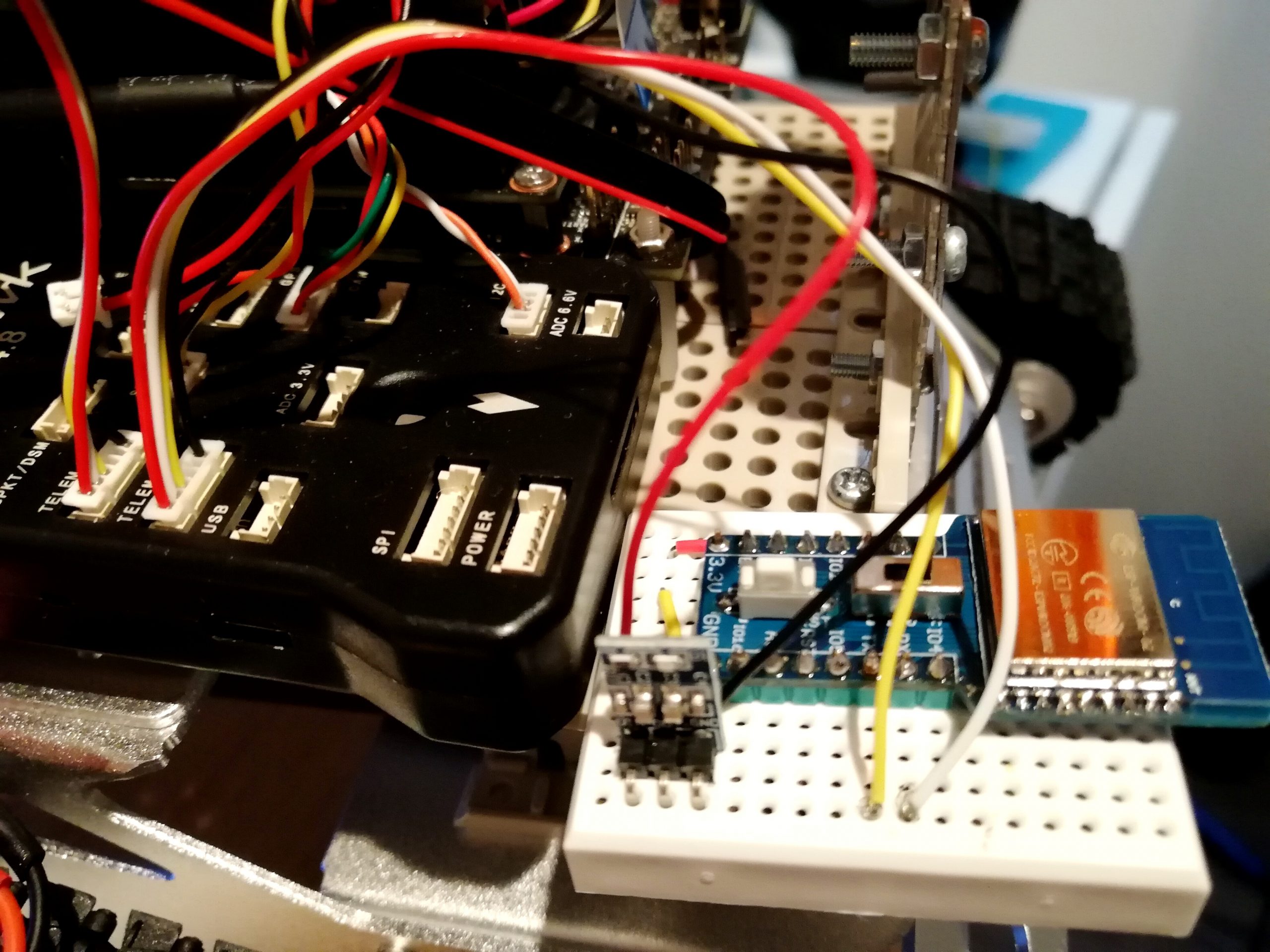
フレームと回路を組み上げる
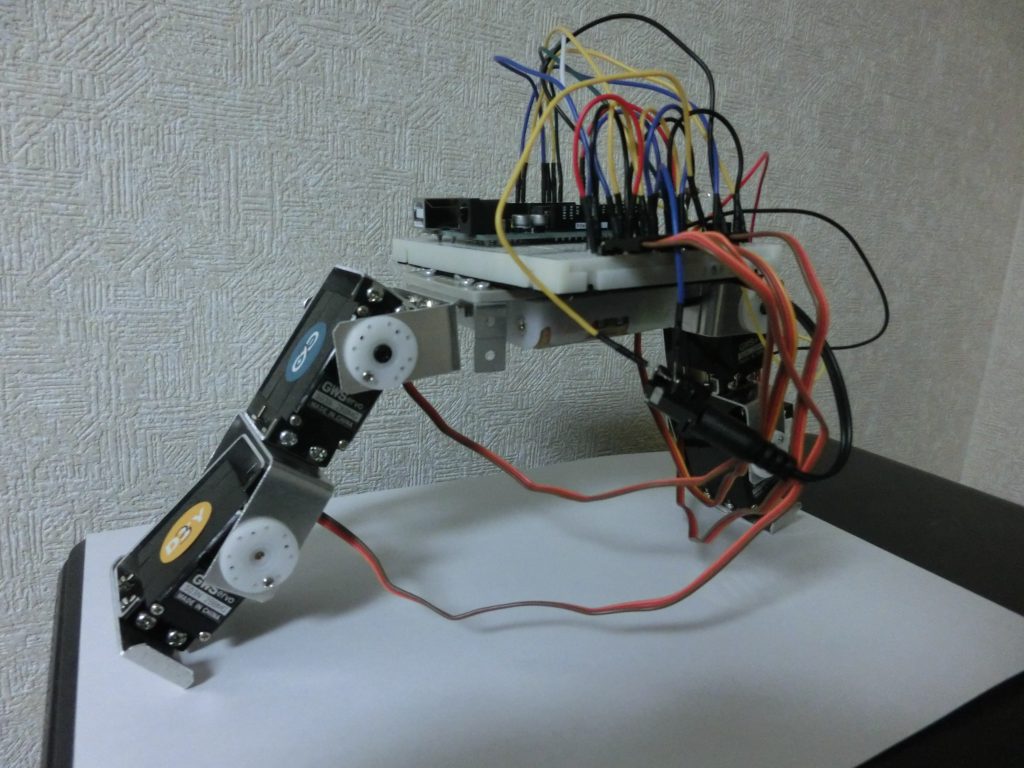
いもむし型ロボットを動かしてみた






コメントを残す