
今回はPixhawkのRoverをクローラー形式にする方法について説明していきます。
通常、PixhawkでRoverをセッティングすると「スロットル」と「ステアリング」でRoverの自動運転の制御を行うことになると思います。例えば自動車の操縦と同じです。
しかし、今回は両方のタイヤを別々に操作して戦車のような操縦ができるようにしたいと思います。

Roverをクローラータイプにする設定
まずはクローラータイプに変更するためにMissionPlannerでパラメータを変更します。
フルパラメータリストを開いて以下のパラメータを設定していきます。
| パラメータ | 解説 |
| PIROT_STEER_TYPE=1 | 通常は「0」になっています。「0」にするとスロットルとステアリングの組み合わせになります。自動車と同じように前進後進とハンドル操作によって進行方向を決定します。
「1」にすると2つのパドルタイプになります。「1」にすると左右のモーターが独立して動くようになります。例えば戦車のように。 |
| FRAME_CLASS=1 | 通常は「1」になっています。「1」にするとローバーモードになります。「2」にするとボートモードになります。見た目もRoverからBoatに変わります。 |
| SERVO1_FUNCTION=73 | 通常は「26」になっています。「26」はステアリングモード(Ground Steering)です。今回は「73」を設定して左スロットルを割り当てます。 |
| SERVO3_FUNCTION=74 | 通常は「70」になっています。「70」はスロットルモード(Throttle)です。今回は「74」を設定して右スロットルを割り当てます。 |
変更したら書き込みを実行してPixhawkにパラメータを書き込みます。
参考記事はこちら
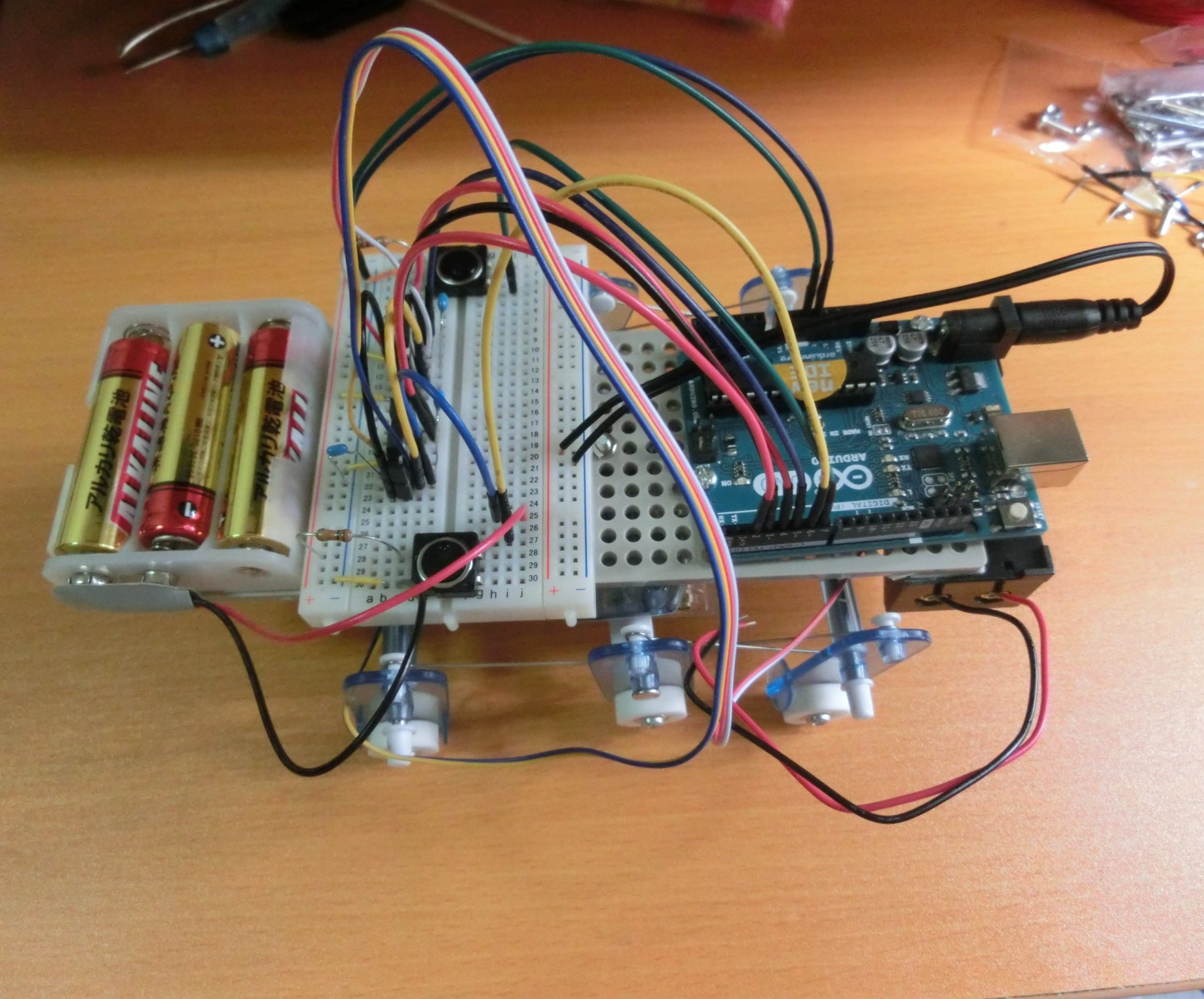
ハードウェアの組み立て
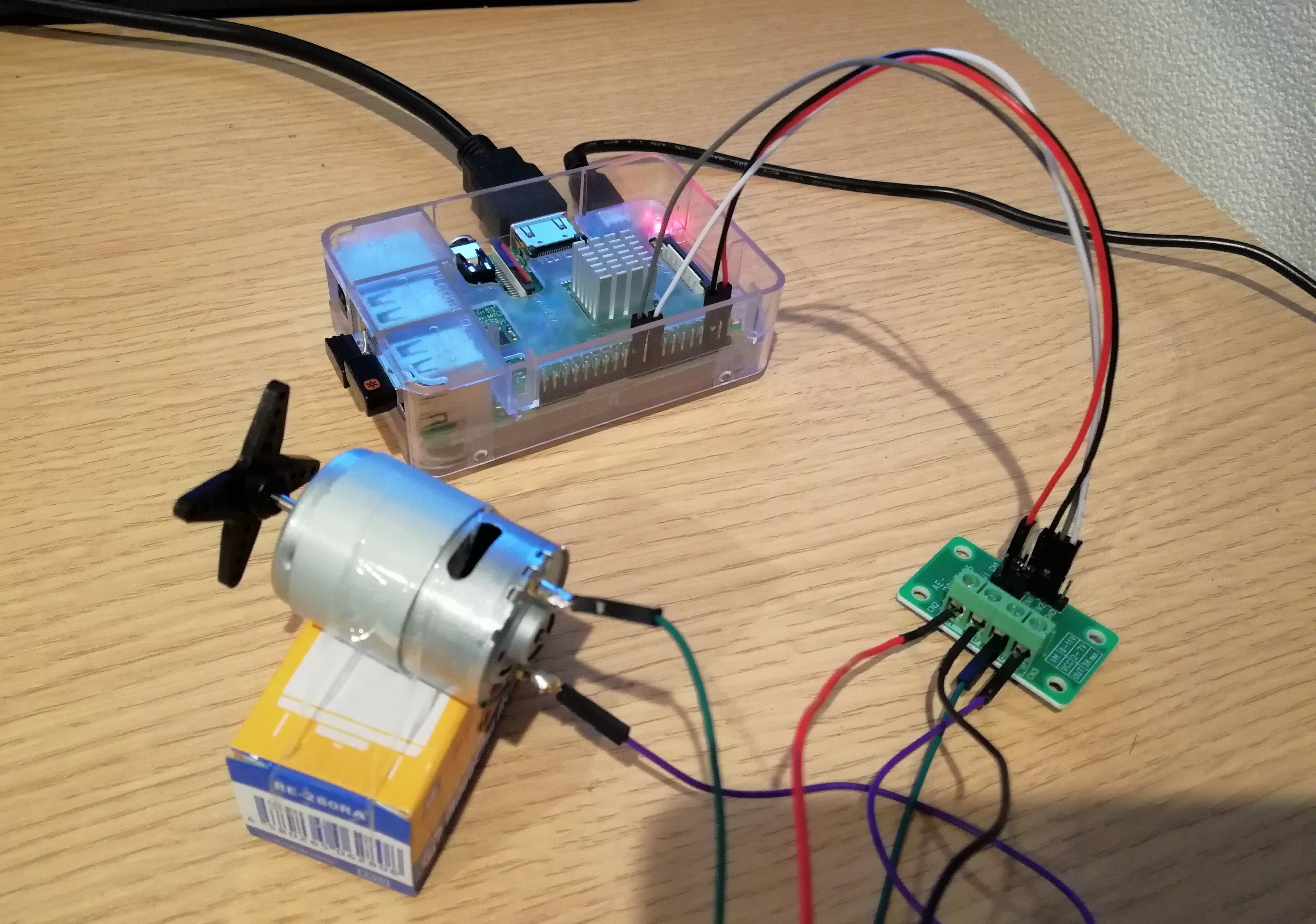
Pixhawkとモーターは以下の通りに接続します。この組み合わせは間違えると自動運転がうまくいかないのでテストで動くことを確認します。
| Pixhawk | Rover out motor |
| RC Output 1 | Left motor control |
| RC Output 3 | Right motor control |
配線が以下のようになっていることを確認します。
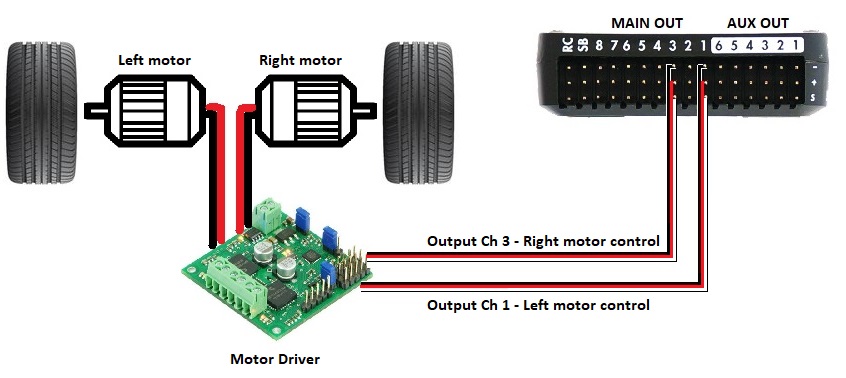
こちらの記事を参照。
モーターのテスト
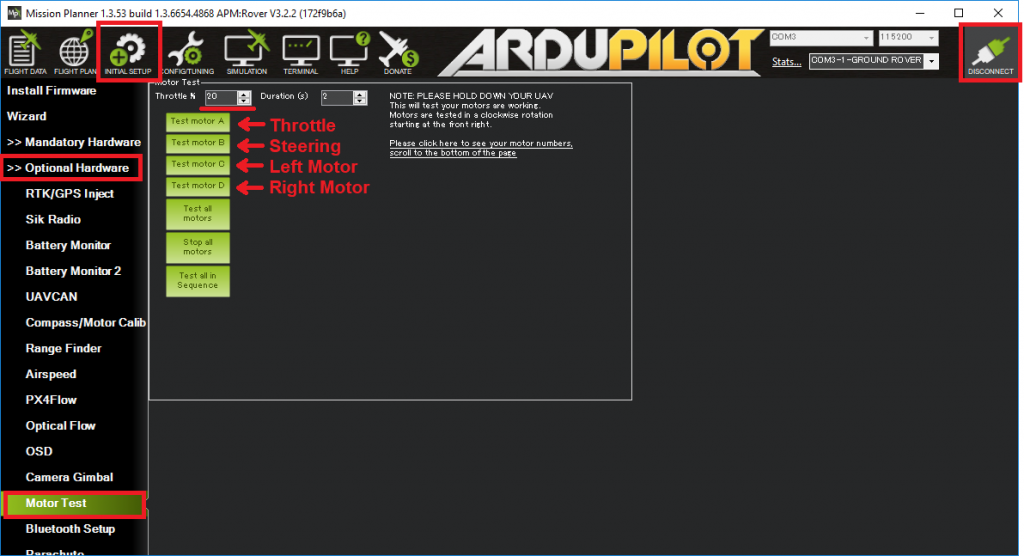
モーターのテストはこちらの手順に従います。
「Test motor C」を押下すると「Left Motor」が動作することを確認します。
「Test motor D」を押下すると「Right Motor」が動作することを確認します。
このテストが上記の通りにならない場合は配線の接続を確認します。


HP拝見いたしました。
当方も。pixhawkにて、ローバーチャレンジしましたが、ESCの設定でうまくいきません。
CH1⇨RCIN1 CH3⇨RCIN3 の設定にすると、ステアリングサーボ、モーターアンプ共に正常に動きますが、CH⇨GROUNDSTERRING CH3⇨THROTTLEにすると、モーターアンプが起動せず、サーボモニターゲージも動きません。
モーターテストも動きません。
バージョンACC3+チェックのエラー表示が出ます。
どのように修正すれば動きますか?
よろしくお願いします。
中森さん
返信が遅くなり申し訳ありません。
「CH⇨GROUNDSTERRING CH3⇨THROTTLEにすると、モーターアンプが起動せず、サーボモニターゲージも動きません。」
こちらについてですが、通常のスロットルとステアリングの組み合わせで操縦したいということでしょうか?
こちらの記事は例えば戦車のように左右にモーターがついているローバーの操作を想定しているのですが、そのような構成のローバーをお使いでしょうか?
お使いのローバーの構成と以下のパラメータの設定値を教えていただけますでしょうか?
・PIROT_STEER_TYPE
・FRAME_CLASS
・SERVO1_FUNCTION
・SERVO3_FUNCTION