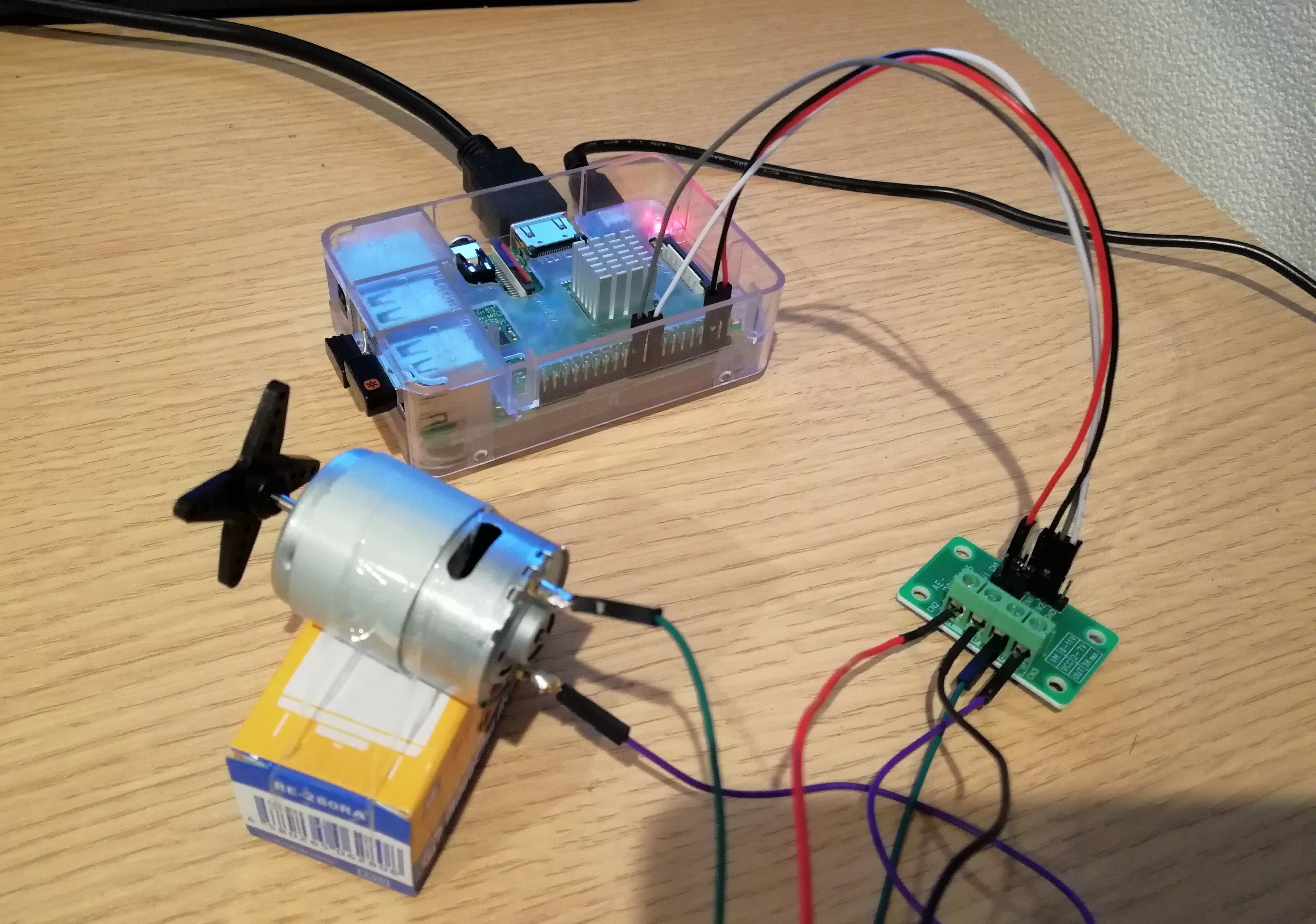
最近の電子工作の入門書ではRaspberryPiとDCモータドライブ「TA7291P」でDCモーターを動かすことが多かったのですが、DCモータドライブ「TA7291P」は生産終了してしまうという情報がありましたので、今回は他の方法でDCモーターを動かすことにしました。
調べて見つけたのが『DRV8835使用DCモータードライブキット』です。今回はこちらを使ってDCモーターを動かしてみたいと思います。
DRV8835使用DCモータードライブキットについて
秋月のサイトから抜粋すると以下のような特徴があります。
・モータ電源VMとロジック電源VCCが分離されています:モータ電源2~11V(VM)、ロジック電源2V~7V(VCC)
・モード設定により2種類の信号付与方式が選択できます。(IN/IN・PHASE/ENABLE)
・Hブリッジ2回路を基板上で並列接続してあるので、1個のDCモータを最大3Aで駆動できます。 つまり、ロジック電源はRaspberryPiのピンから出力される3.3Vでも動かせますし、モーターも「RS-380PH-4045」ぐらいまでなら動かせそうです。
詳細については「DRV8835使用DCモータードライブキット」の取扱説明書をご参照ください。
必要なもの
今回は以下のものを用意しました。DCモータードライブキットは検索すると他にもありましたが、今回はこちらが用途的によさそうだったので購入しました。
・DRV8835使用DCモータードライブキット

・DCモーター(RS-385PH-4045)

・ACアダプタ(DC6V 1.8A)[もしくは単三乾電池4本]
・DCジャック(ACアダプタと配線を接続する用)
・RaspberryPi3B+ ・
+ドライバ
・はんだごて
・ハンダ
・ピンヘッダ
部品の半田付け
DRV8835使用DCモータードライブキットの中身には以下の部品が入っています。ピンは細ピンが入っていますが、ジャンパーワイヤを差すとスカスカ状態になっていますので太いサイズのピンヘッダを用意しておきます。 半田付け完了後の写真を参考にして半田付けを行っていきます。
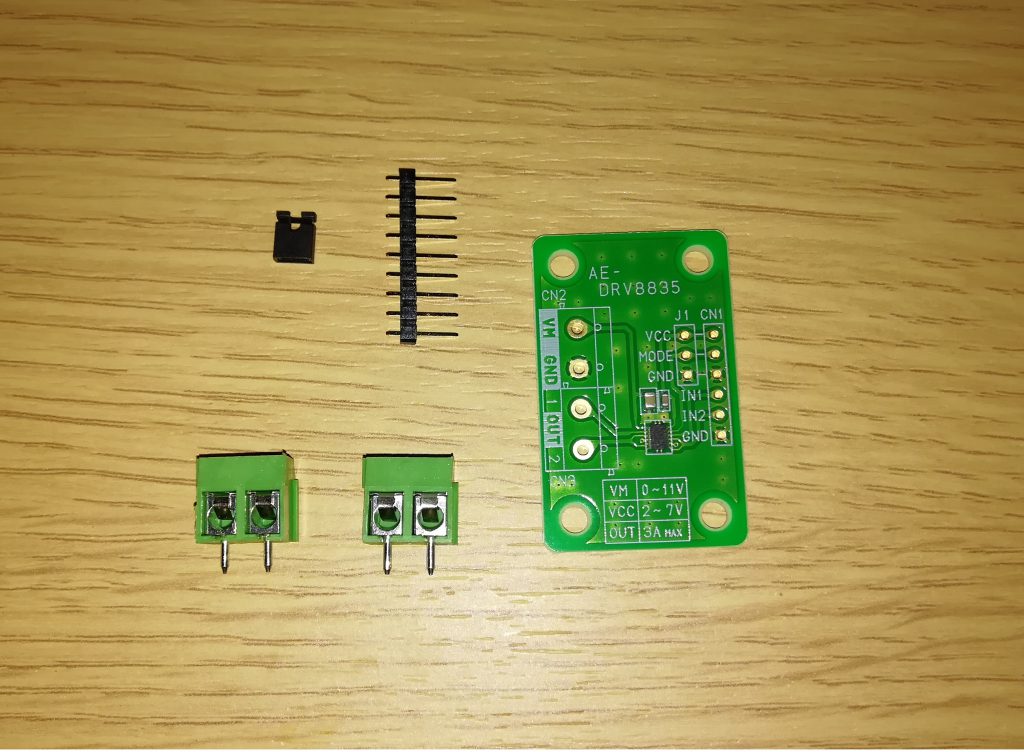
半田付け完了後はこのようになります。
※以降は有料部分となります。この有料部分にも時間をかけたからこそ分かるノウハウを書いています。更新するたびに販売価格を上げていくことも検討致します。
ご購入していただいた皆様、誠にありがとうございました。








コメントを残す