まずは秋葉原で部品を調達!
まずはロボットを作るのに必要な部品を秋葉原にて調達しました。
行ったお店は「秋月電子」と「千石電商」です。
主に必要なのは以下の部品でした。
・DCモータドライブ(型番:TA7267BP)×2
・測距モジュール(型番:GP2YOA21YK)×2
・抵抗
・積層セラミックコンデンサ
・タクトスイッチ
・DCジャック
・ユニバーサル基板
でも、電子部品なんて買ったことがないし、お店の中は電子部品がたくさんあったのでどこにあるか分らず苦労しました。。。
どうにか本の写真と型番を頼りにして探し出すことができました。
自宅に帰ってさっそく制作を開始!
帰ったらまずはロボットの本体の方を組み立てました。
タミヤのツインモーターギヤボックスを説明書の通りに組み立て、オフロードタイヤセットとともにユニバーサルプレートにねじで取り付けました。
モーターにはセラミックコンデンサをはんだ付けで取り付ける必要があったので、久しぶりのはんだ付けに苦労しました。
ここで注意したいのは、短い電線をモーターの端子にはんだ付けしてしまうと、ロボット本体に設置するArduinoのACアダプタまでの長さが足りなくてやり直しになるので、線の長さは余裕ももっておくことがポイントでした。
次に制御回路の制作に取り掛かりました。
本に載っている制御回路基板の実体配線図に沿って正確に配線をしていくことがポイントです。また、ユニバーサル基板に差す部品は先にハンダで仮付けしておくと、配線のイメージがついて作業しやすいと思います。
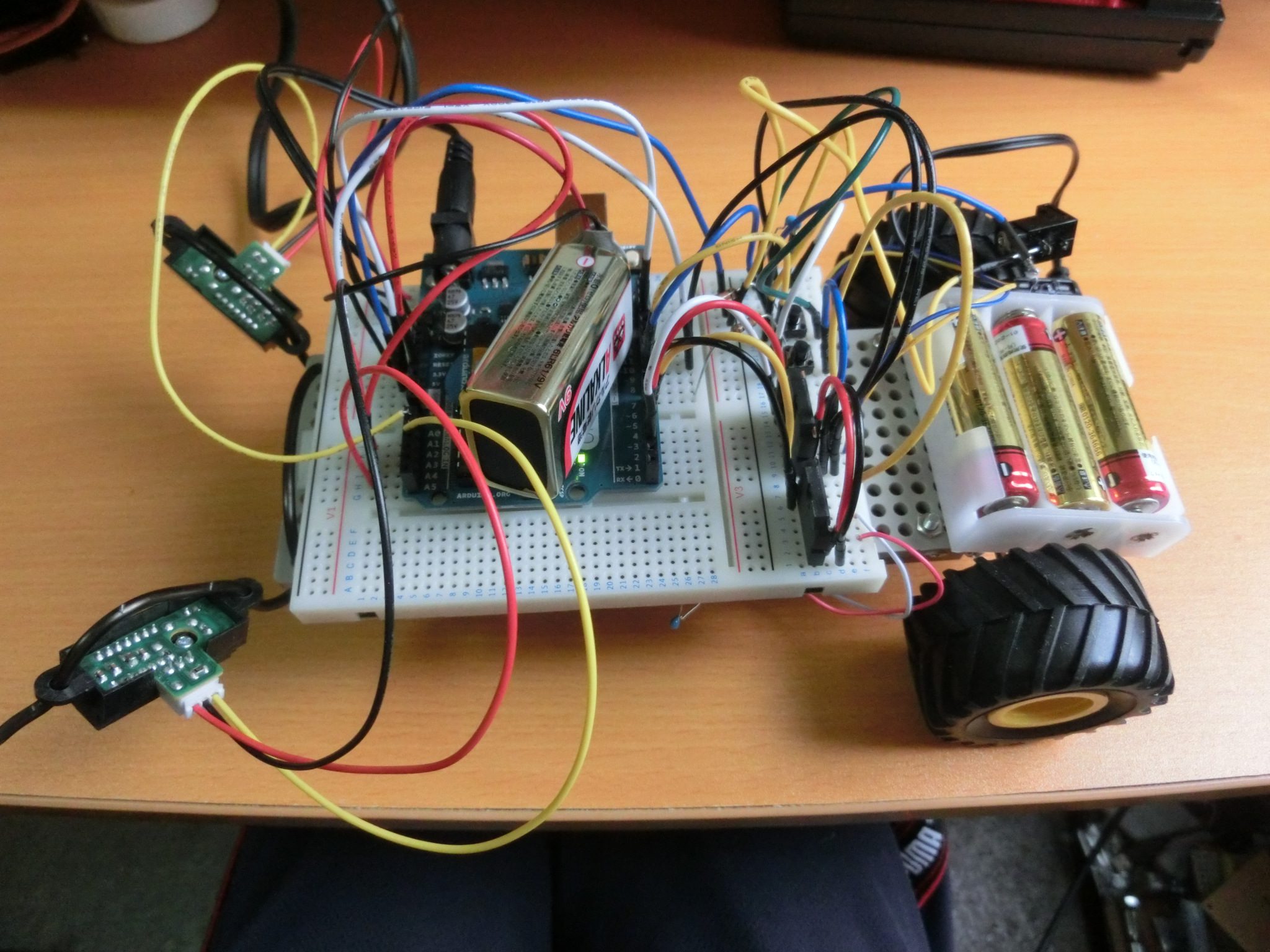
回路が出来上がり、ロボット本体に取り付けるとこんな感じになります。↓
テーブルから落ちないロボットができました!

ロボットのプログラムを組んでいく!
ここまでくると完成した!という感じになりますが、もう少しやることがありました。
そう、ロボットをプログラムがまだ組まれていません。。。
ArduinoをUSBポート経由でパソコンに接続し、専用のソフトウェアで本の通りのプログラムを組んでいきます。
これも本の通りに入力していくだけです。
まずは何はともあれ、全てのプログラムを入力してみて、動かなかったらデバックするほうが作業効率がいいような気がします。
ちなみにプログラムの内容は、赤外線センサからの値を読み取って、その条件判定でロボットを前進させたり回転させたりしているプログラムになっていました。
Arduino専用の関数があるようなので、組み合わせるといろんな動作が実現できて面白そうです。






コメントを残す