

Google Search Consoleでrobots.txtが「未取得」と表示される件について調査してみた
最近、自分のレンタルサーバーで「kazuki-room.com」というドメインを運用してるんですが、Google Search Consoleでrobots.txtファイルが「未取得」となって、ブログ記事がインデックスさ...
 雑記
雑記最近、自分のレンタルサーバーで「kazuki-room.com」というドメインを運用してるんですが、Google Search Consoleでrobots.txtファイルが「未取得」となって、ブログ記事がインデックスさ...
はじめに 容量が小さいPC(256GB)で今まで頑張ってきましたが、容量を空けてもすぐに一杯になってしまいます。特にDocker DesktopをWindowsにインストールして開発していると、すぐに容量が埋まってしまい...
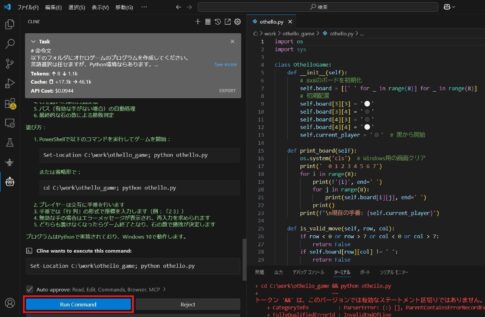
はじめに 英語が苦手な私は、Clineを利用してサンプルのFlaskアプリの翻訳に挑戦しました。プログラミングには興味があるものの、英語の壁によく悩まされています。しかし、ClineのようなAIツールが私を支えてくれまし...
 AI
AIはじめに 最近、アプリケーション開発やコーディングの効率を飛躍的に高めるツールとして、Visual Studio Code (VSCode)とClineの組み合わせが注目を集めています。本記事では、この強力なツールセット...
 観光
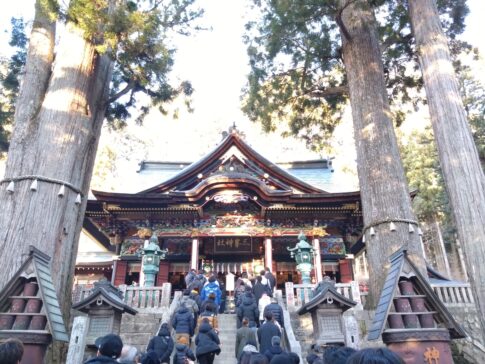
観光ドライブの計画と出発 出発時の天気とレンタカーの手配 2月の三連休に、妻と弟と共に東京の八王子から秩父の三峰神社までドライブに行ってきました。この日は非常に寒かったものの、青空が広がり、絶好のドライブ日和に恵まれました。...
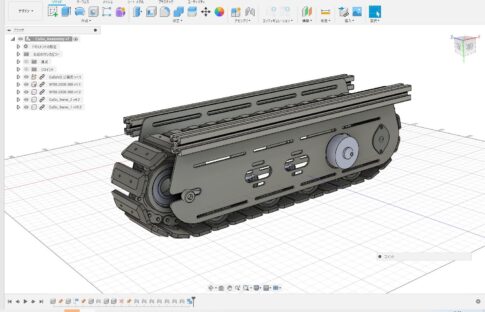 CAD
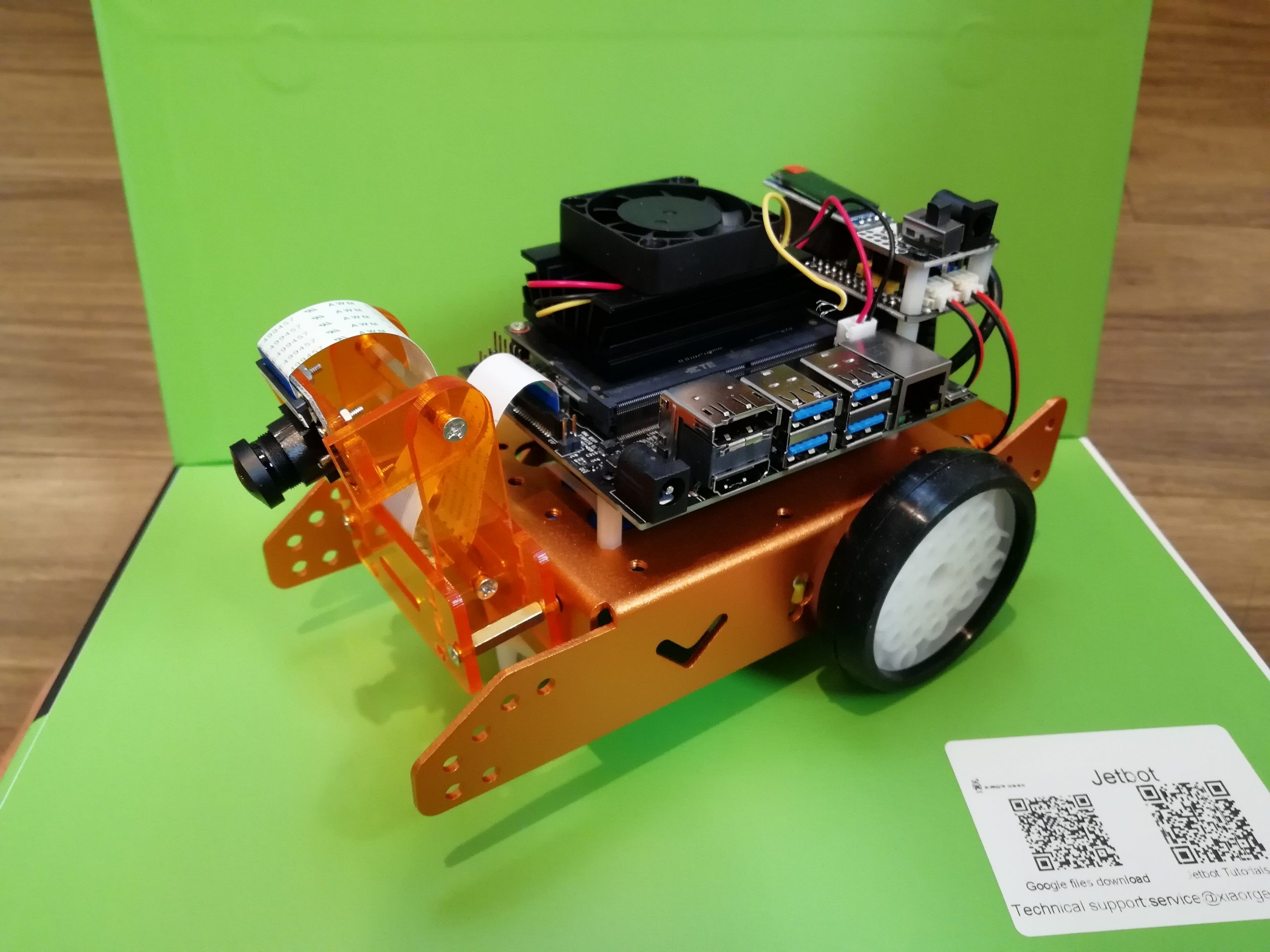
CADCuGo導入計画と設計ミス CADデータと実物のサイズの不一致 開発しているロボットにCuGoを導入する計画を立てていた際、私がダウンロードしたCADデータと手元にあるCuGoのミスミフレームサイズが異なるという致命的な...
 雑記
雑記久しぶりにリポジトリを作成し、GitHubからそのリポジトリをクローンしようとしたときに、いままではできていたパスワードでのクローンができなくなっていました。特に、過去には何の問題もなくクローンできていたため、何が悪いの...
 旅行
旅行ケアンズ新婚旅行で訪れたリーフホテルカジノ 新婚旅行の楽しみとは?それは間違いなく二人だけの楽しい思い出を作る旅にありますが、今回のケアンズ旅行での楽しみの一つはカジノ体験でした。ラスベガスで一度だけ味わったカジノの魅力...
 旅行
旅行ケアンズに行くからには、現地の美味しいものを味わいたい!ということで、人気のステーキハウス「Waterbar & Grill Steakhouse」を訪れました。今回は、公式サイトからの予約方法とともに、お店での...
 旅行
旅行ケアンズの大自然での乗馬体験概要 オーストラリアの美しい大自然を体感しながら、馬とのふれあいを楽しむ貴重な体験ができるケアンズの乗馬ツアーに参加してきました。乗馬は未経験だったので多少不安はありましたが、初心者の私でも安...
 旅行
旅行HISツアーの詳細と持ち物リスト 新婚旅行にオーストラリアを選んだ理由 私たちが新婚旅行先にオーストラリア、特にケアンズを選んだのは、一言で言えば「コアラに抱きつきたい!」という熱い思いからです。さらに、広大な大自然もじ...
 旅行
旅行仙台駅からホテル瑞鳳までのバスの乗り方と日帰り温泉の楽しみ方 2024年の年末は仙台の奥さんの実家に泊まりに行くことになりました。ただ、12月30日に立てていた計画が中止となってしまったので、緊急プランとして日帰りで秋保...
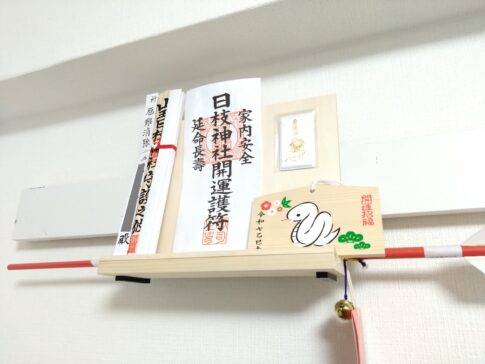 3Dプリンター
3Dプリンター自宅にぴったりの神棚をDIYする理由 初詣での厄除け体験 今年も初詣の季節がやってきました。私が訪れたのは、赤坂の日枝神社です。この神社はとても混んでいて、参拝するのに30分ほど待たされましたが、厄除けを無事に終えること...
 AI
AIはじめに この記事では、ChatGPTとPythonを活用して、さくらサーバーのWordPressに記事を自動投稿する方法について解説します。 以下の記事を参考にさせていただきました。 ChatGPT&Pytho...
 GCP
GCPCloud Functionsで手軽にAPIサーバーを構築!HTTPトリガーでPythonコードを実行 サーバーレス環境で、Pythonコードを簡単にAPIとして公開したいと思いませんか?Google Cloud Fun...
 Blog
Blog今回はさくらのレンタルサーバの新しいコントロールパネルを使用して、Google Search ConsoleのTXTレコードを設定する方法についてご説明します。 注意:この記事は自己責任に基づいて行ってください。 Goo...
 Blog
Blogバックアップを作成しておいたほうがよいとき ウェブサイトの運営中には、以下のような場合にバックアップを作成しておくことが重要です。 ・WordPressのバージョンアップを行う前 ・テーマを変更する前 ・プラグインを変更...
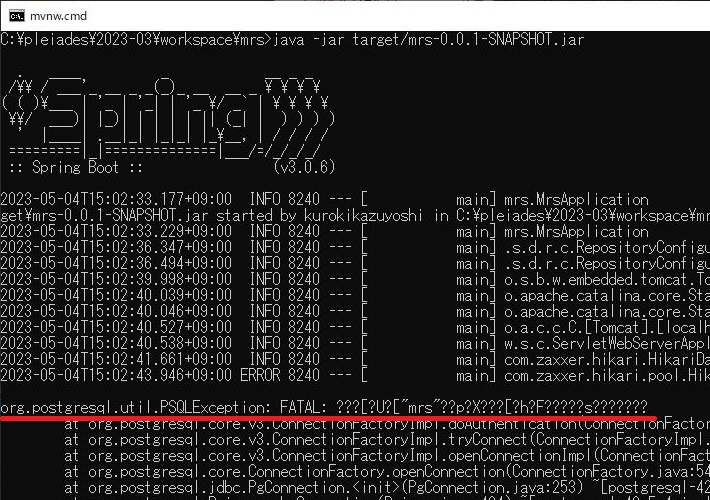 雑記
雑記SpringBootのプロジェクトを実行したとき、以下のPostgreSQLのエラーが文字化けされた状態で出力されました。今回はその文字化けを解消しましたので備忘録として残しておきたいと思います。 [crayon-687...
 雑記
雑記SpringBootでエンティティクラスを作成し、インポートを実施すると「import javax.persistenceが見つからない」と表示される。 pom.xmlのJPAの設定を確認 原因を調査した結果、まずpom...
 未分類
未分類今回はWindows10にUbuntuをインストールする方法を説明します。 Linux用Windowsサブシステムにチェックを入れる まず、Windowsの設定を開き、「プログラムと機能」から「Windowsの機能の有効...

KAZUKIです。
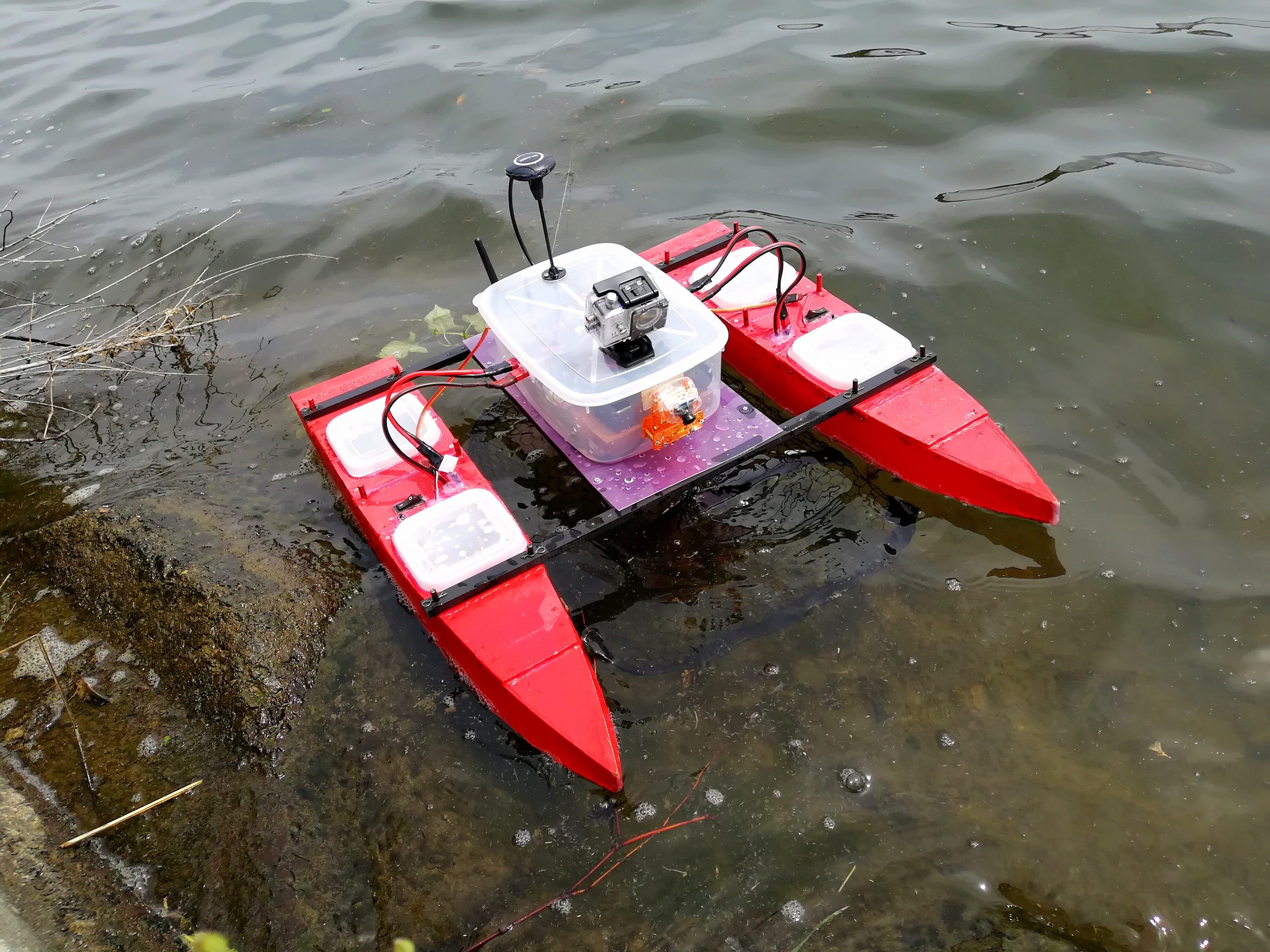
モノづくりが好きで、ブログでは電子工作やゴミ回収ロボットのことを書いています。
その他雑記も書きます。興味のある記事がありましたら是非読んでみてください。
< Twitterプロフィール >
https://x.com/RoomKazuki