ロボコンなどをやったことがある人なら聞いたことがあるかもしれません。
最近のロボコンなどでよくテーマになる「二足歩行ロボット」。これを実現するのはなかなか難しい。。
ASIMOのように作れたらいいなとか思いますが、あれはプロの人たちが何年もかけて制作した努力の結晶です。
それを真似ようとしても数ヶ月では到底真似などできないでしょう。(もちろんASIMOのようなロボットを作るのもアリですし、作れたらカッコいいと思います!)
ではどのようにして二足歩行ロボットを実現するか?
それはリンク機構を使う方法です!
リンク機構を用いれば複雑な計算やサーボモータの制御なども行わなくていいですし、比較的簡単です。
ロボコンの競技などには最適なのではないかと思います。
数あるリンク機構の中でもとくに「二足歩行ロボット」として利用できるのが「チェビシェフリンク」です。
チェビシェフリンクは以下の比率で構成されています。
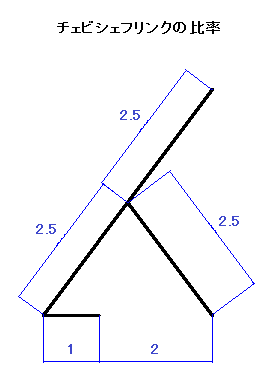
この「チェビシェフリンク」は疑似直線の軌道を描きますので、それをそのままロボットの歩行に見立てて組み立てることができます。
2DCADで書いてみるとこんな感じ↓
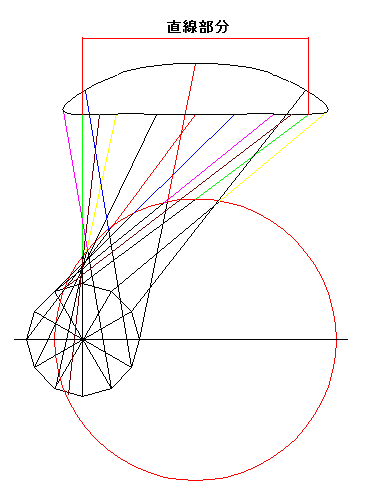
リンクの軌道に直線部分があることが分かります。
この軌道をロボットの「歩行」にすればいいということです。動きについてはこの動画が分かりやすいです。
ロボットにすると以下のような構造になると思います。
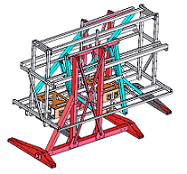
言うだけだと簡単ですが、実際はリンク機構を組み立てるのに苦労すると思います。
駆動部分をどうするだとか、配線ができないだとか、ガタが多すぎて使い物にならないだとか。。。
でもそれを乗り越えるとちゃんとした「二足歩行ロボット」を作ることができます。
今のところ、この「チェビシェフリンク」以上に二足歩行ロボットに適しているリンク機構は見たことがありません。
弱点はロボットに旋回機能をつけづらいところでしょうか。そこはさらに工夫が必要になると思います。
サーボモータなどを使用せずに二足歩行ロボットを実現したい場合には「チェビシェフリンク」を使ってみたらどうでしょうか。
こんなことをやってます!こちらも見てください!