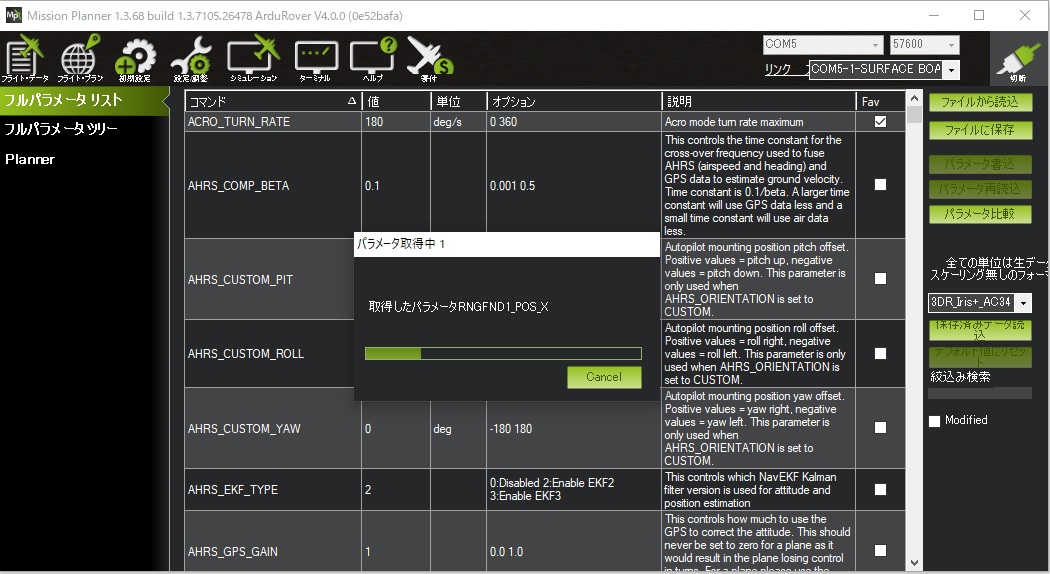
MissionPlannerに接続すると、パラメータのロードが「STAT_RUNTIME」で止まる件
MissionPlannerに接続すると、パラメータのロードが「STAT_RUNTIME」で止まる現象が発生しました。今回はその対応を記載しておきます。 参考になったページはこちらです。 Mission planner ...
 電子工作
電子工作MissionPlannerに接続すると、パラメータのロードが「STAT_RUNTIME」で止まる現象が発生しました。今回はその対応を記載しておきます。 参考になったページはこちらです。 Mission planner ...
 電子工作
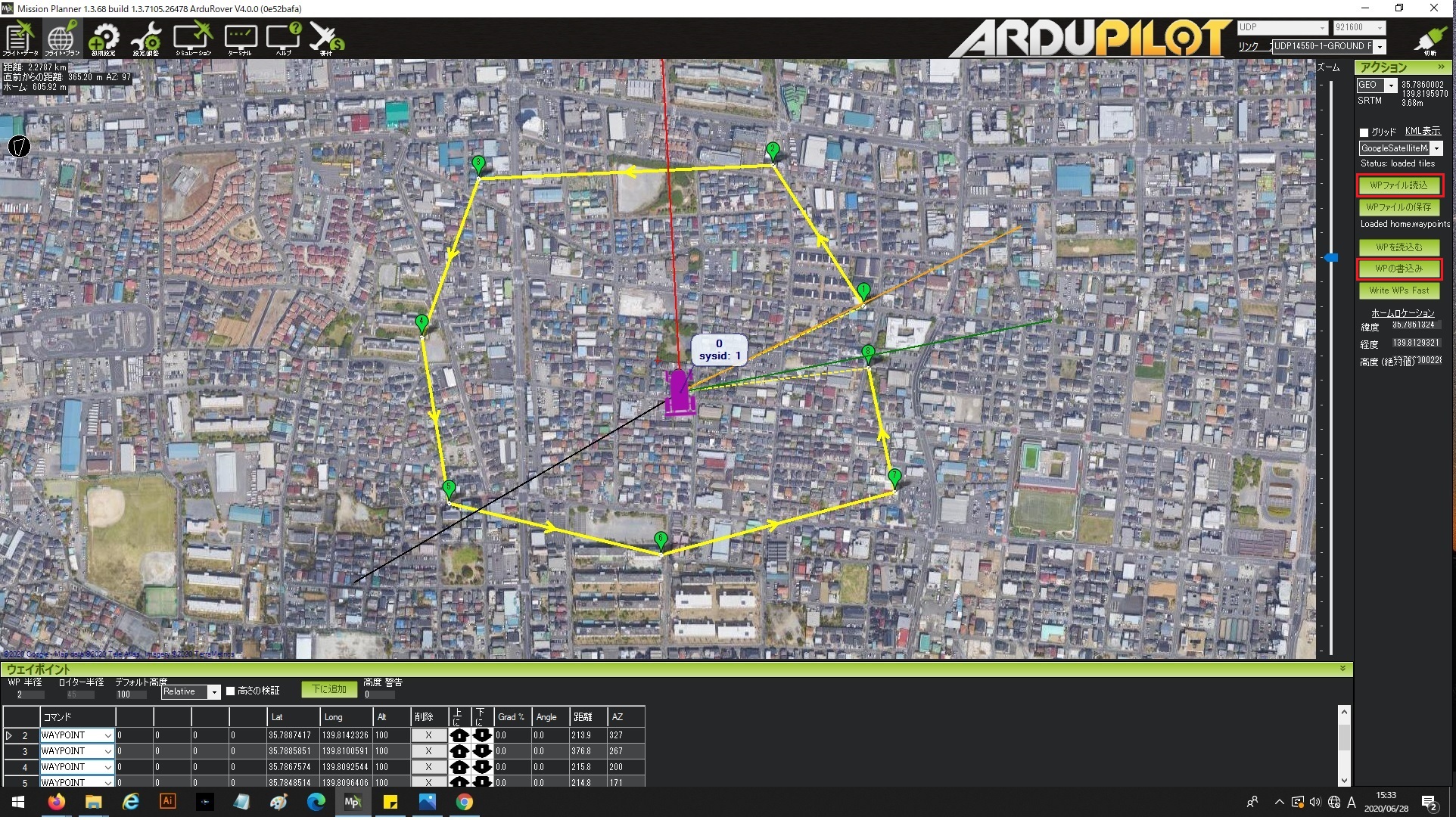
電子工作今回はPixhawkのRoverをクローラー形式にする方法について説明していきます。 通常、PixhawkでRoverをセッティングすると「スロットル」と「ステアリング」でRoverの自動運転の制御を行うことになると思い...
 電子工作
電子工作Roverの制作方法 今回使用したRoverの制作手順は以下の記事に記載しました。 pixhawkを設定してROSでRoverを動かす方法 上記で制作したRoverがこちらとなります。 Roverの自動運転を開始する手順...
 電子工作
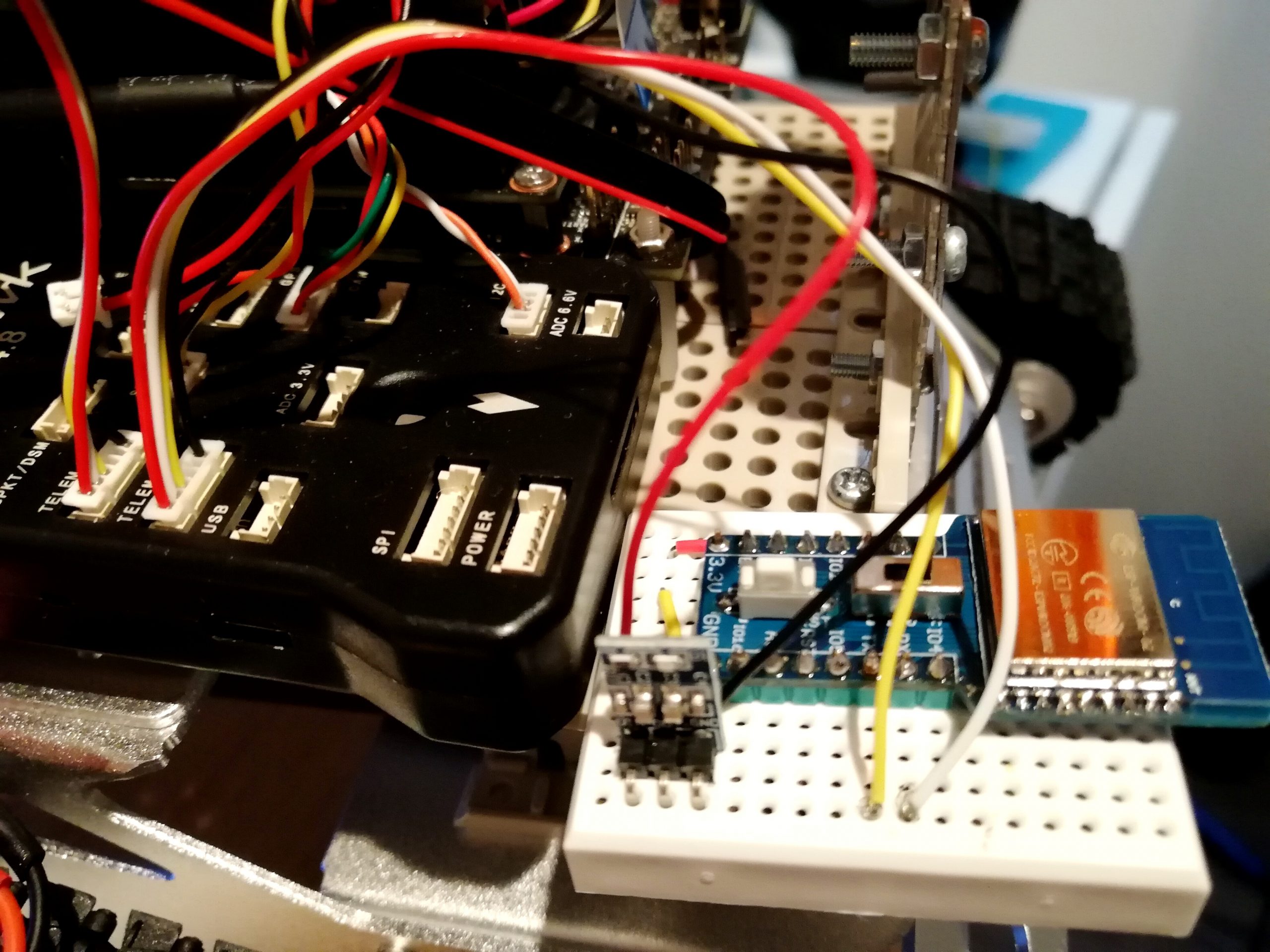
電子工作今回はpixhawkの無線通信をESP-WROOM-02で行ってみましたので、その備忘録を残しておきます。 参考にした記事 以下の記事を参考にしました。 本家のサイトの記事です。基本的にはこちらに記載されている内容の設定...

KAZUKIです。
モノづくりが好きで、ブログでは電子工作やゴミ回収ロボットのことを書いています。
その他雑記も書きます。興味のある記事がありましたら是非読んでみてください。
< Twitterプロフィール >
https://x.com/RoomKazuki