まずは部品を調達します
まずはロボットを作るのに必要な部品を秋葉原にて調達しました。
行ったお店は「秋月電子」と「千石電商」です。
主に必要なのは以下の部品でした。
【送信機の部品】
・Arduino UNO
・赤外線LED
・抵抗
・タクトスイッチ
・ユニバーサル基盤
【ロボット本体の部品】
・Arduino UNO
・赤外線リモコン受信モジュール
・DCモータドライブIC
・積層セラミックコンデンサ
・ユニバーサル基盤
・タミヤ ユニバーサルプレート
・タミヤ ツインモーターギヤーボックス
・タミヤ トラック&ホイールセット
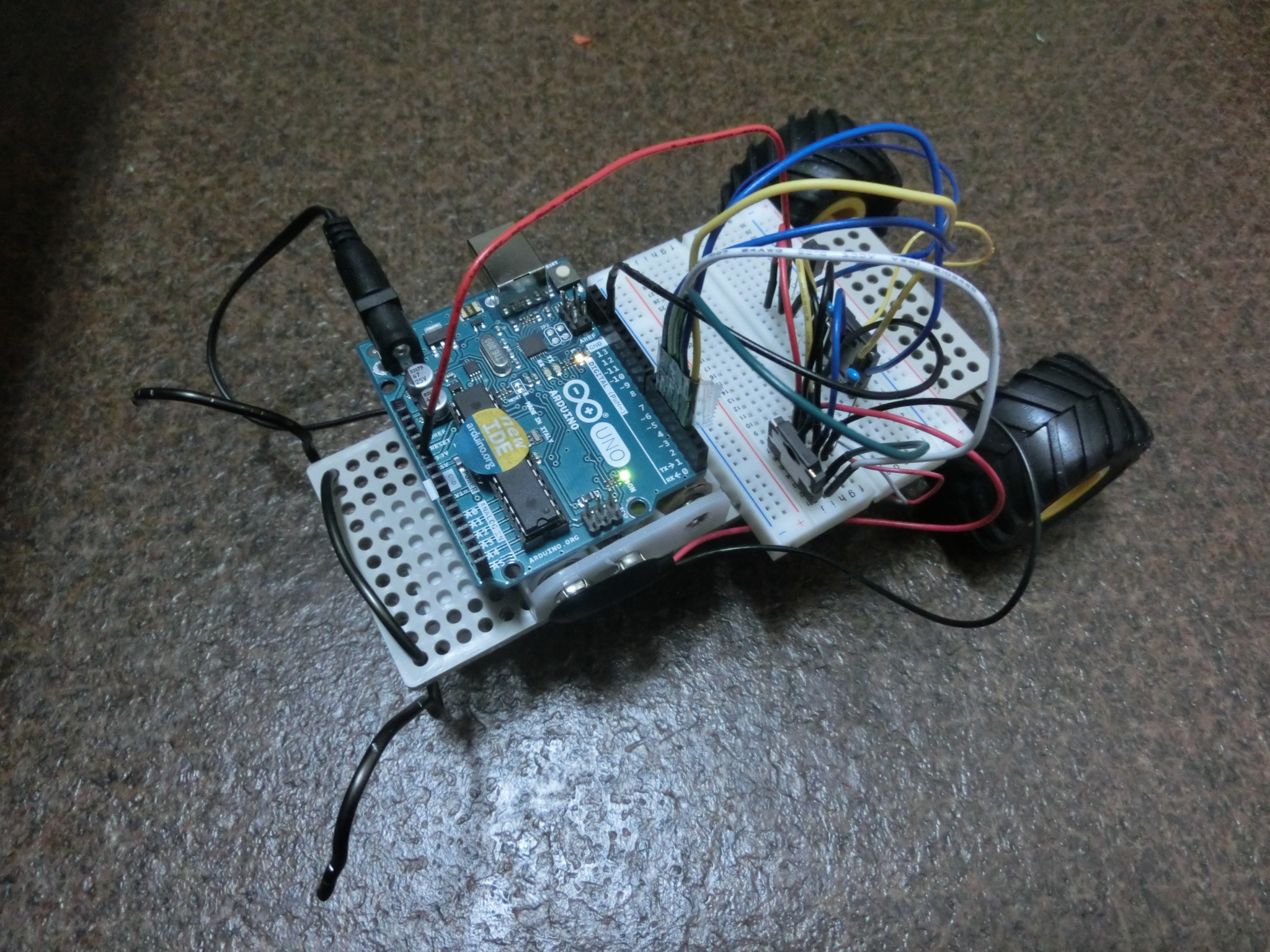
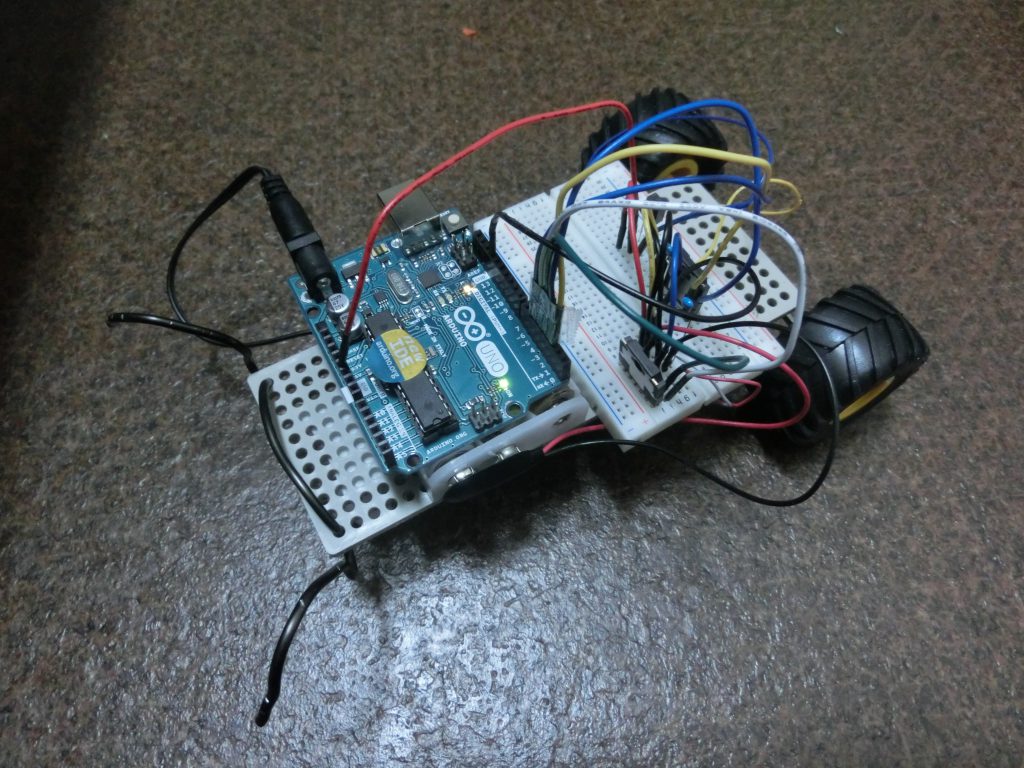
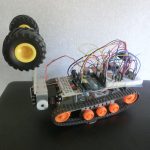
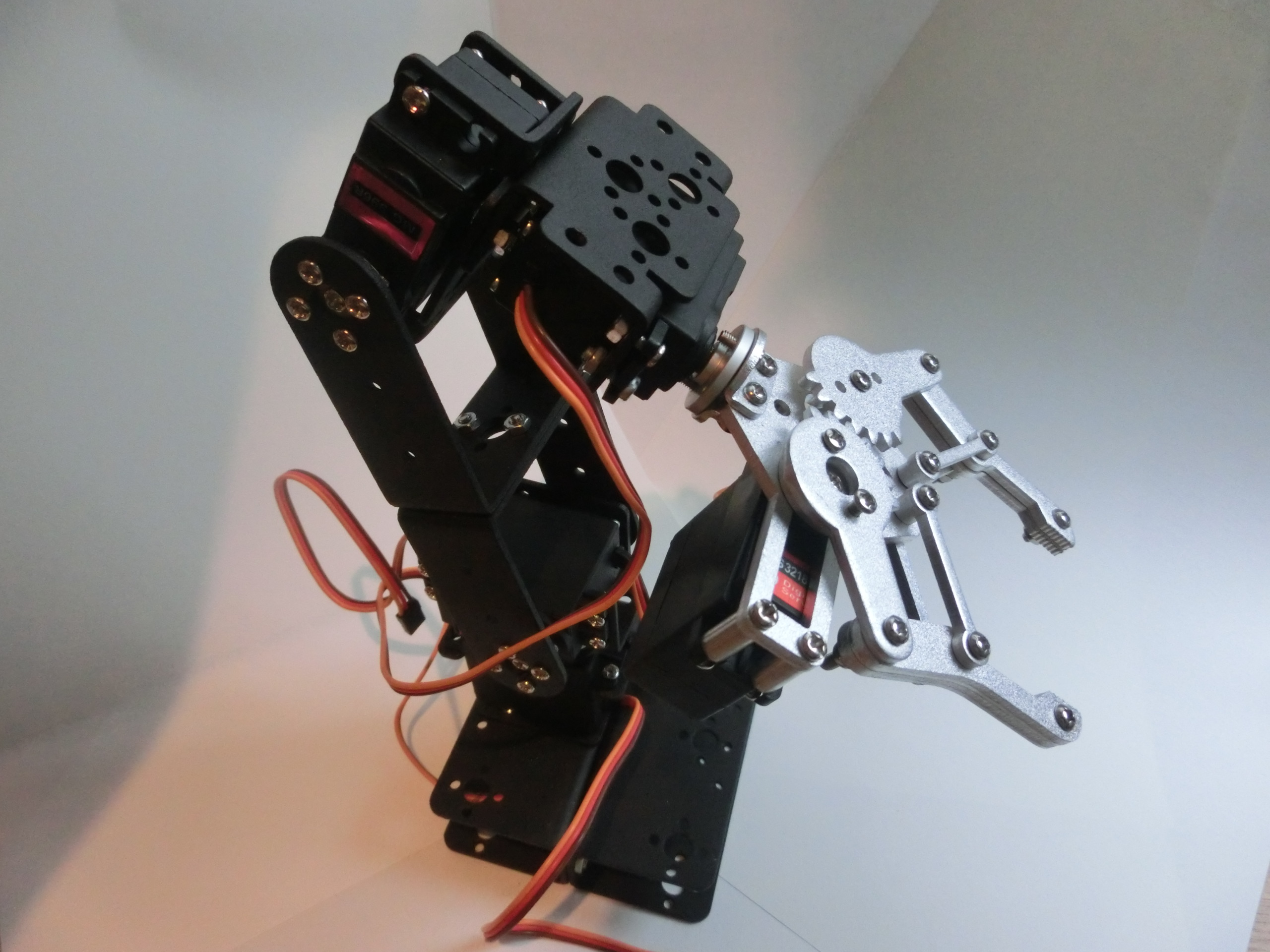
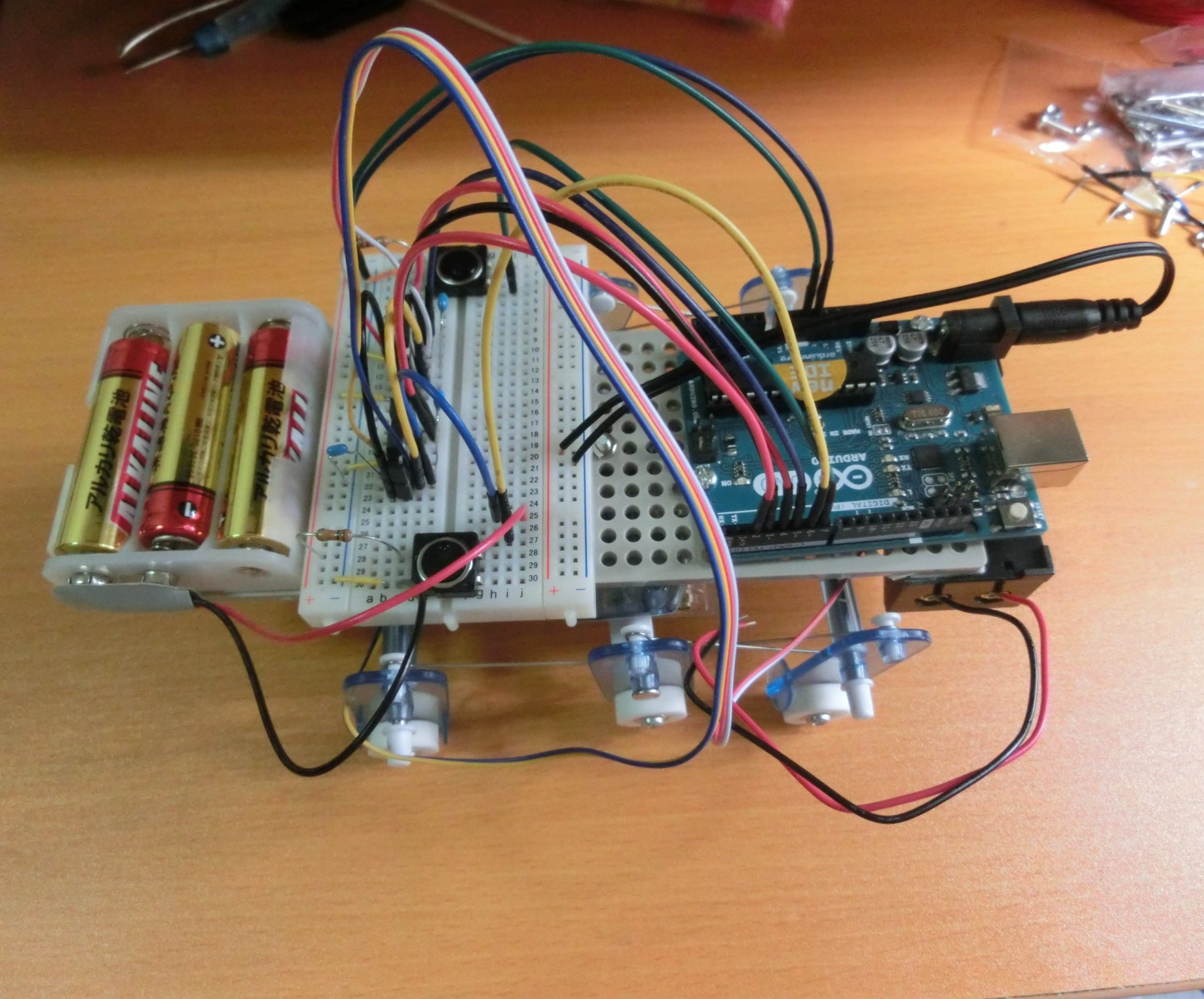
ロボット本体の組み立て
本のスケッチを参考にしながらキャタピラ車のロボット本体を組立てていきます。
トラック&ホイールセットは説明書の通りにそのまま組み立てていきます。
電池ボックスとArduinoをキャタピラ車に固定するためには長いねじが必要ですので、あらかじめ用意しておく必要があります。
ロボットを操作している途中に固定している基盤がぐらつかないようにネジの両側をしっかりとナットで固定しておくことがポイントです。
送信回路と受信回路の製作を行います
送信回路と受信回路の製作を行います。
実体配線図の表面と裏面を見ながら配線していきます。
最初にボタンを配置してから、抵抗などを設置していくと配線のイメージがついて作業しやすいと思います。
ボタンは押したときの通電する向き(4本の足のうち、ボタンを押すとどことどこが繋がるのか)がありますので、
あらかじめテスターなどで通電する向きを確かめてからユニバーサル基盤に設置していきます。
また、Arduinoをねじ固定する穴も必要となってきますので、事前にハンドドリルなどで穴を開けます。
ハンドドリルがない場合はピンバイス等で穴あけを行います。
Arduinoの送信機と受信機のプログラムを組んでいきます
ArduinoをUSBポート経由でパソコンに接続し、専用のソフトウェアで本の通りのプログラムを組んでいきます。
まず、送信機側のほうのプログラムは、4つのボタンの入力値を判定することで赤外線の信号を送信するプログラムになっていました。
受信機のほうは送信機から送られてきた信号の値を読み取り、それを判定することによって「前進」「後進」「左回転」「右回転」を実施するようになっています。




プログラムって何の本みたんですか?
匿名さん
はじめまして。
こちらの記事にあるのは「Arduinoでロボット工作をたのしもう! 」の内容を見て作ったロボットだったかと思います。
今は第2版が発売されているようですが、当時は第1版のほうを持っていたと思います。