CuGo導入計画と設計ミス
CADデータと実物のサイズの不一致
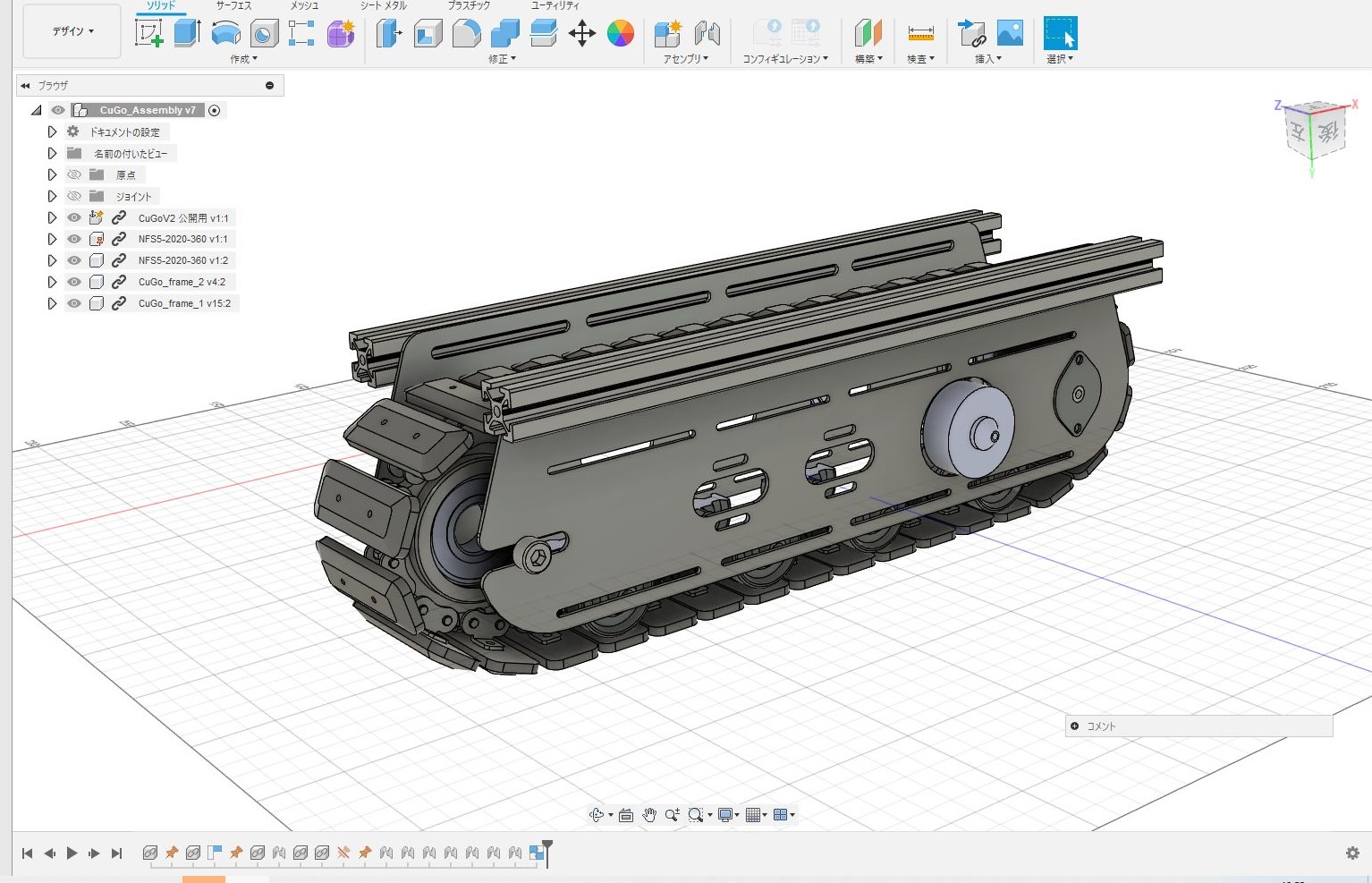
開発しているロボットにCuGoを導入する計画を立てていた際、私がダウンロードしたCADデータと手元にあるCuGoのミスミフレームサイズが異なるという致命的な設計ミスが発覚しました。具体的には、CAD上では「20×20mm」のフレームとして設計されていたのですが、実際に手元にあるCuGoのフレームは「15×15mm」ということが判明したのです。以下はダウンロードしてきたCuGoのCADです。
CuGoの改造に向けた準備
無駄にならない方法の検討
無駄にしたくない一心で様々な改造方法を検討しました。最初は既存のフレームを流用することも考えたのですが、物理的なサイズの不一致を解消するのは難しそうでした。最終的には、CuGoを直接改造することが最も実現可能な選択肢であると結論づけました。
CuGoの分解と寸法計測
改造に着手するためには、まずCuGoを分解し、板金フレームの実寸法を計測する必要がありました。これが今回行った作業の中で最も大変な部分でしたが、確かなデータを取得するためには欠かせない作業です。


CADデータの作成と変更
Fusion360での3DCADデータ作成
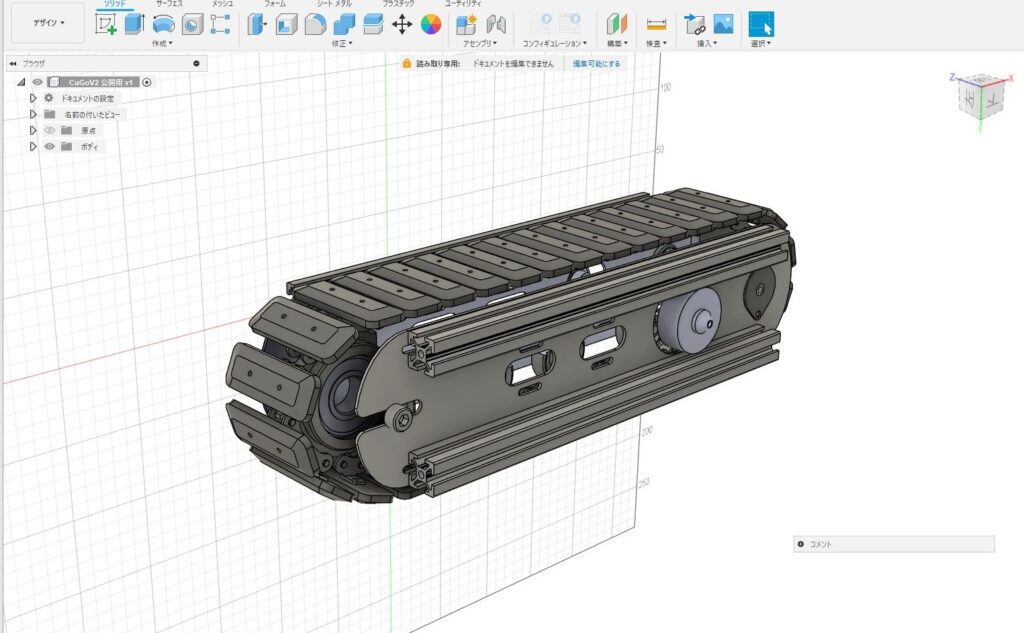
分解して得た寸法データをもとに、Fusion360を用いて新たな3DCADデータを作成しました。これが非常に重要なステップであり、精度の高いデータが必要になります。
板金フレーム形状の変更
次に、「20×20mm」のミスミフレームと取り付けられるように、設計した板金フレームの形状を変更しました。この段階では、計測したデータを正確に反映させることが求められます。
以下はDCモーターを固定する側のフレームです。
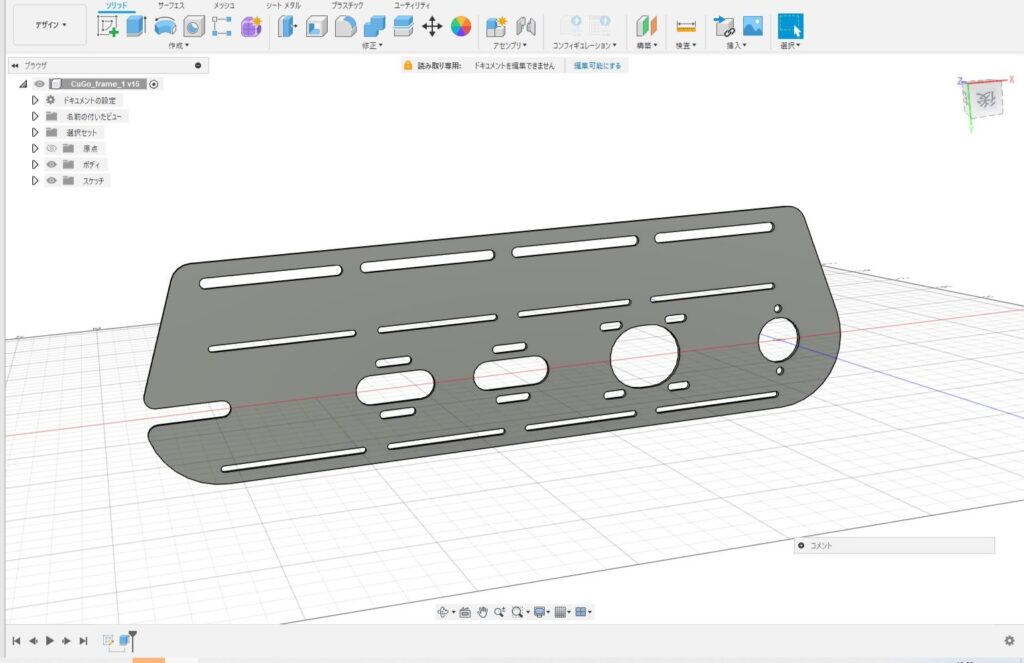
以下は反対側のフレームです。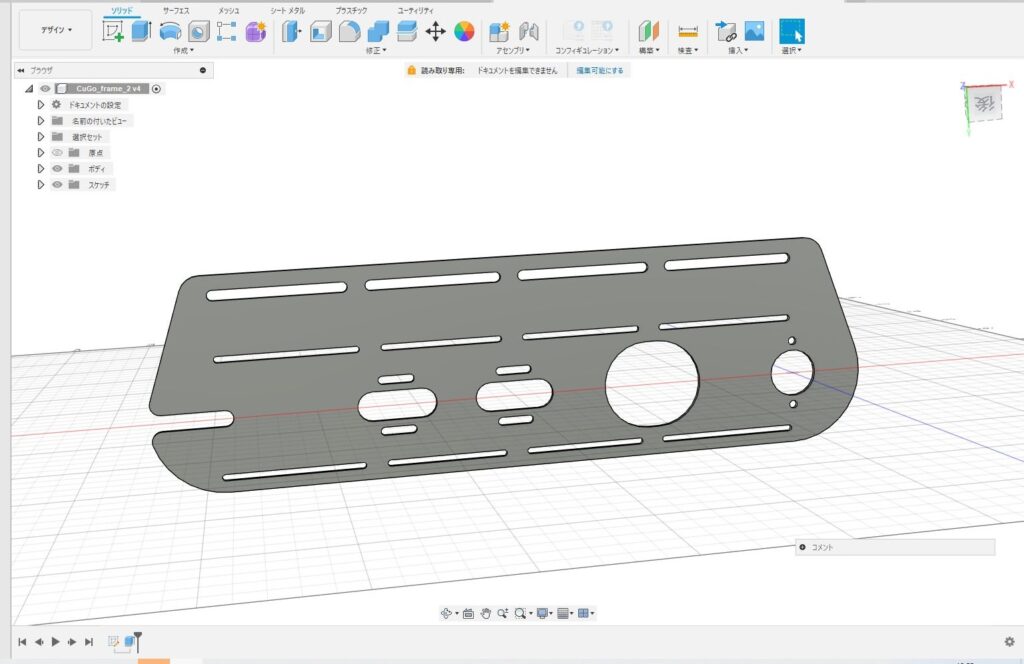
改造したCuGoの結合データ
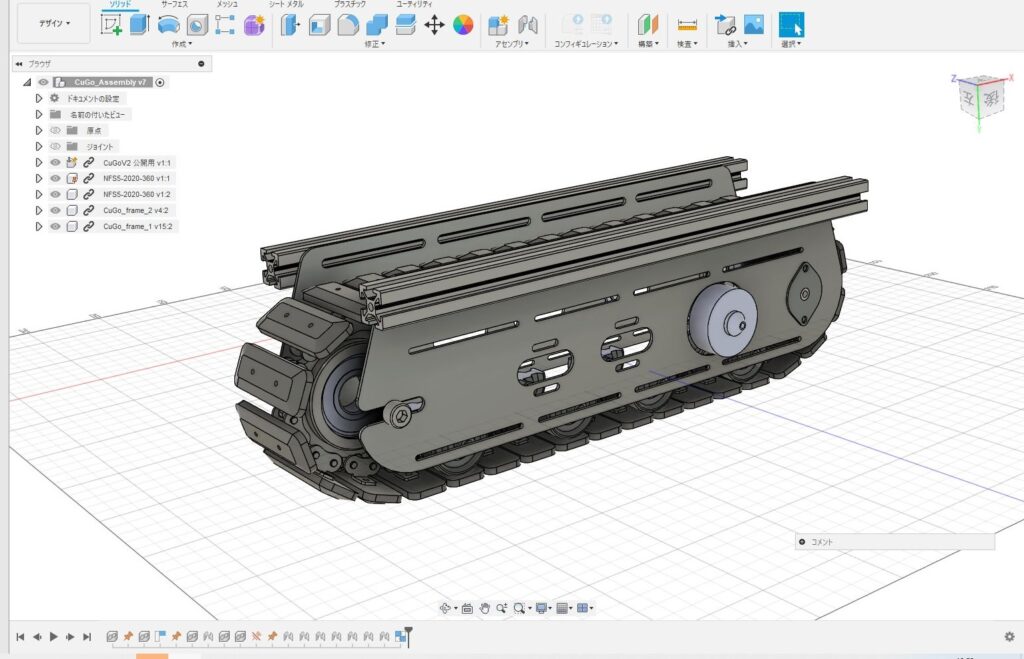
ダウンロードしてきたCADデータと上記のフレームを結合させると以下のようになりました。
STEPファイルのエクスポートとデータ取り込み
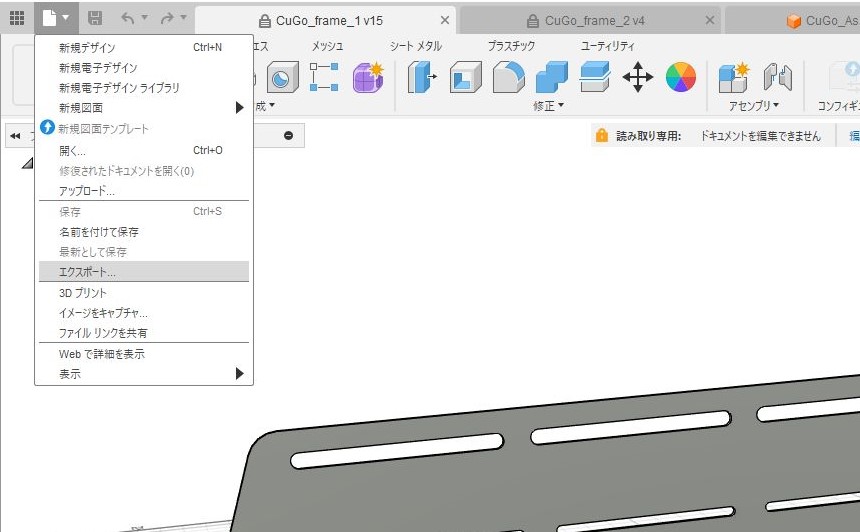
CADデータのエクスポート手順
設計が完了したら、CADのエクスポート機能を使用して、CADデータをSTEPファイル形式で出力しました。
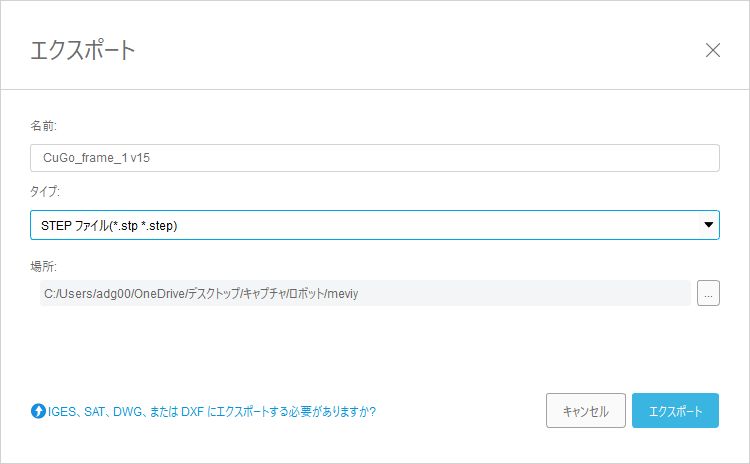
MISUMI meviyへのアップロード
次に、MISUMI meviyのサイトにログインし、出力したSTEPファイルを取り込みました。このプラットフォームでは、簡単な形状であればそのまま取り込むことができ、とても便利でした。

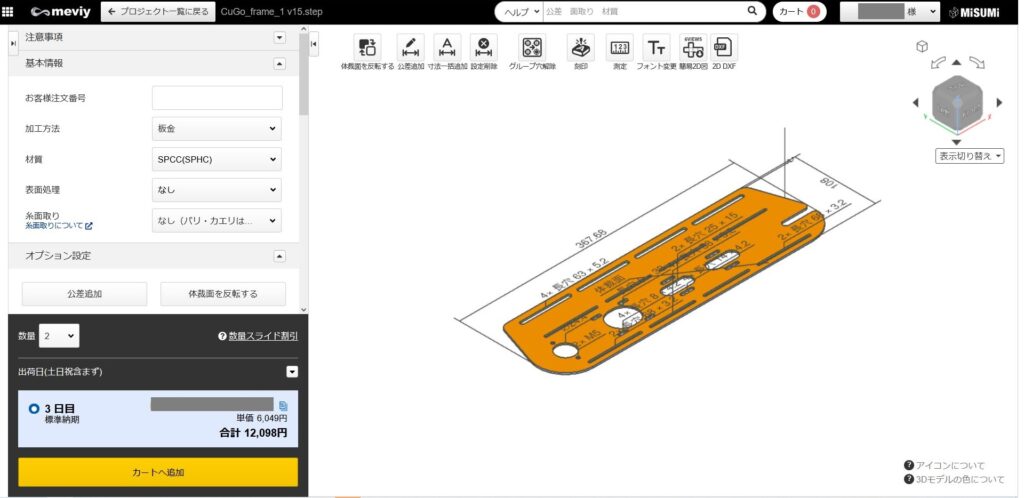
加工方法と材質の指定
加工方法については「板金」を選択し、材質や必要な仕様も選択しました。必要に応じて、ネジ切りや公差の指定もできるため、設計の意図をしっかり反映させることができました。自動で見積りが完了し、その後数量や納期、価格を確認して発注を行いました。

詳細の設定画面はこちらです。
フレームの発注と取り付け
発注後のフレーム受け取り
フレームの発注が完了し、1週間ほどでフレームが届きました。

CuGoへの新しいフレーム取り付け
新しいフレームをCuGoに取り付けてみると、予想通り「20×20mm」のミスミフレームを適切に取り付けることができました。私の設計が実を結んだ瞬間で、非常に達成感がありました。しかし、自らのミスによって余計な時間がかかってしまったことは反省すべき点です。


まとめと今後の改造計画
CuGoのシンプルさと扱いやすさ
CuGoはそのシンプルで扱いやすい構造によって、改造作業が円滑に進められました。今回の経験から、「CuGoをカスタマイズする際には、正確なデータを基にしっかりとした計画を立てることが重要だ」と学びました。今後またCuGoの改造を行う際は、今回の手順を踏まえて、よりスムーズに作業を行っていきたいと考えています。