ロボットの部品を調達してきます!
今回もロボットを作るのに必要な部品を秋葉原にて調達しました。
行ったお店は「秋月電子」と「千石電商」です。
主に必要なのは以下の部品でした。
・RCサーボ
・マイクロスイッチ
・DCモータドライブIC
・測距モジュール
・抵抗
・積層セラミックコンデンサ
・タクトスイッチ
・ピンヘッダ
・DCジャック
・ユニバーサル基盤
・タミヤユニバーサルプレート
・タミヤツインモーターギヤーボックス
・タミヤスポーツタイヤセット
・小径プラスチックキャスタ
詳細は「Arduinoでロボット工作をたのしもう!」をご参照ください。

ロボットの本体を作成!
ロボットの上面図と下面図を参考にしてロボットの本体を組み立てます。
スポーツタイヤセットとキャスタ、マイクロスイッチは下面図を参考にして取り付けます。
上面図からはユニバーサルプレートとArduinoと測距モジュール、4本入り電池ボックスを取り付けます。
ユニバーサルプレートと基盤を固定するネジの穴の位置合わせはなかなか合わないので、
多少ネジは傾いて固定することになるかもしれません。
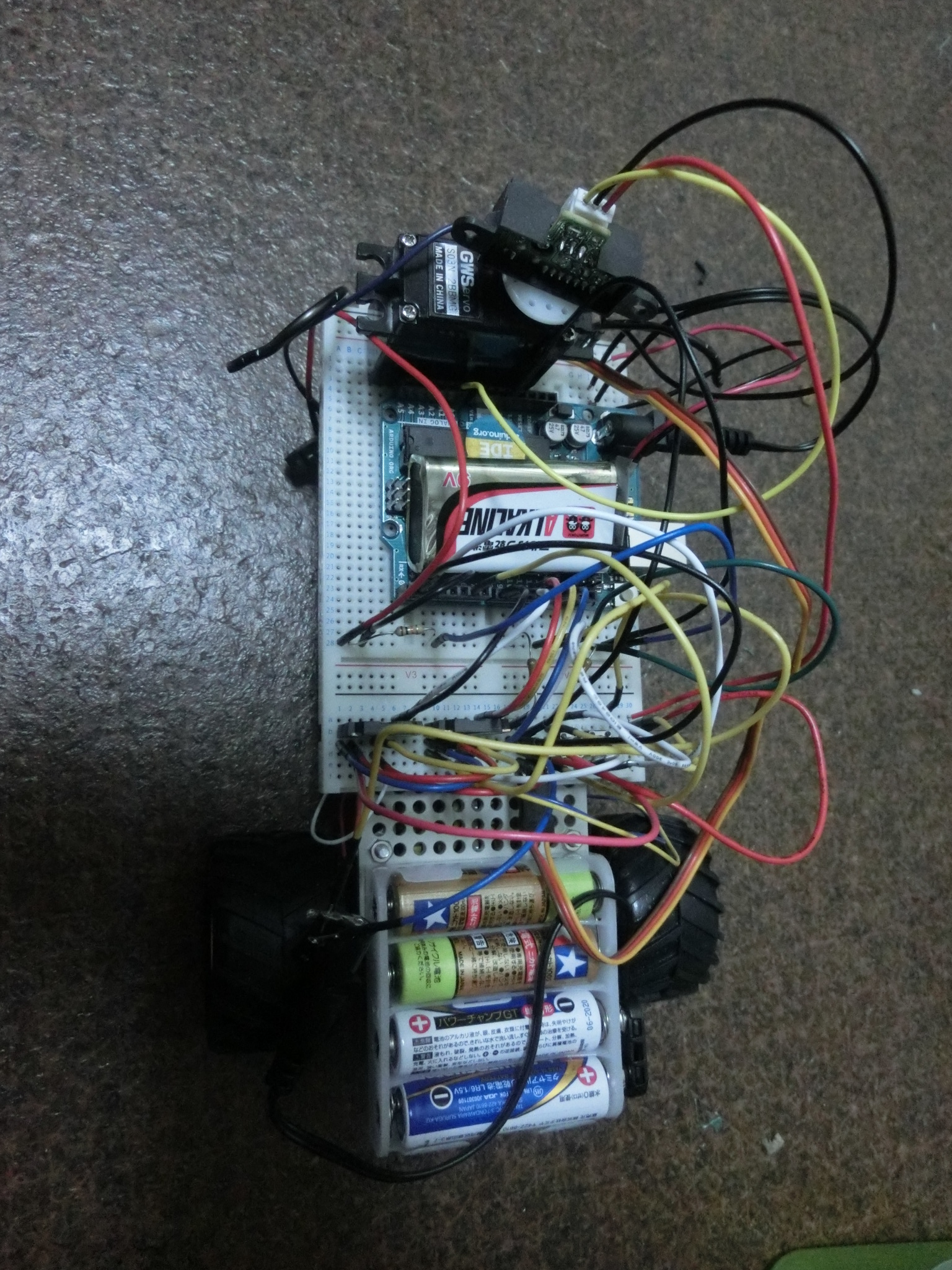
組み立てが完了するとこんな感じになります↓
障害物を避けるロボットを組み立てました!

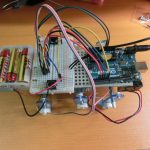
ロボットの制御回路を制作します!
次にロボットの制御回路を「ロボットの制御回路図」と「実体配線図」を参考にして制作していきます。
今回も制御回路の仕組みを理解するには、「制御回路図」を参考にし、実際の配線では「実体配線図」を参考にすると制作しやすいです。
今回は部品同士のスペースが狭いので、ちょうどよい位置を探して全ての部品を設置できるようにすることがポイントです。
また、DCジャックは取付金具が基盤には直接ささらないため、基盤を少し削ってDCジャックを固定する必要があります。
ロボットのプログラムを書いていきます!
ロボットのプログラムを書いていきます。
本に載っているプログラムは少し長いですが、頑張って間違えずに入力していきます。
このロボットはサーボモータの上に測距モジュール搭載してあり、サーボモータを回転させることで
周りの障害物をサーチしながら進んでいきます。
関数がどのような動きになるか最初はイメージしにくいので、最初はサーボモータだけを動かすプログラムを書いてみて
そこから、全体のプログラムを書いていくと分かりやすい思います。
障害物を避けて走り回るロボットを動かしてみました
おお!周りの物に確かに反応して動いてる!笑
こんな感じにセンサを利用してロボットを操作できるのであれば、応用次第でいろんな動作をするロボットを作ることができそうです。
電池も意外と早く消費してしまうので、可能であれば充電池を使うといいかもしれません。
今後もArduinoを利用して作ったロボットの紹介をしていきたいと思います。