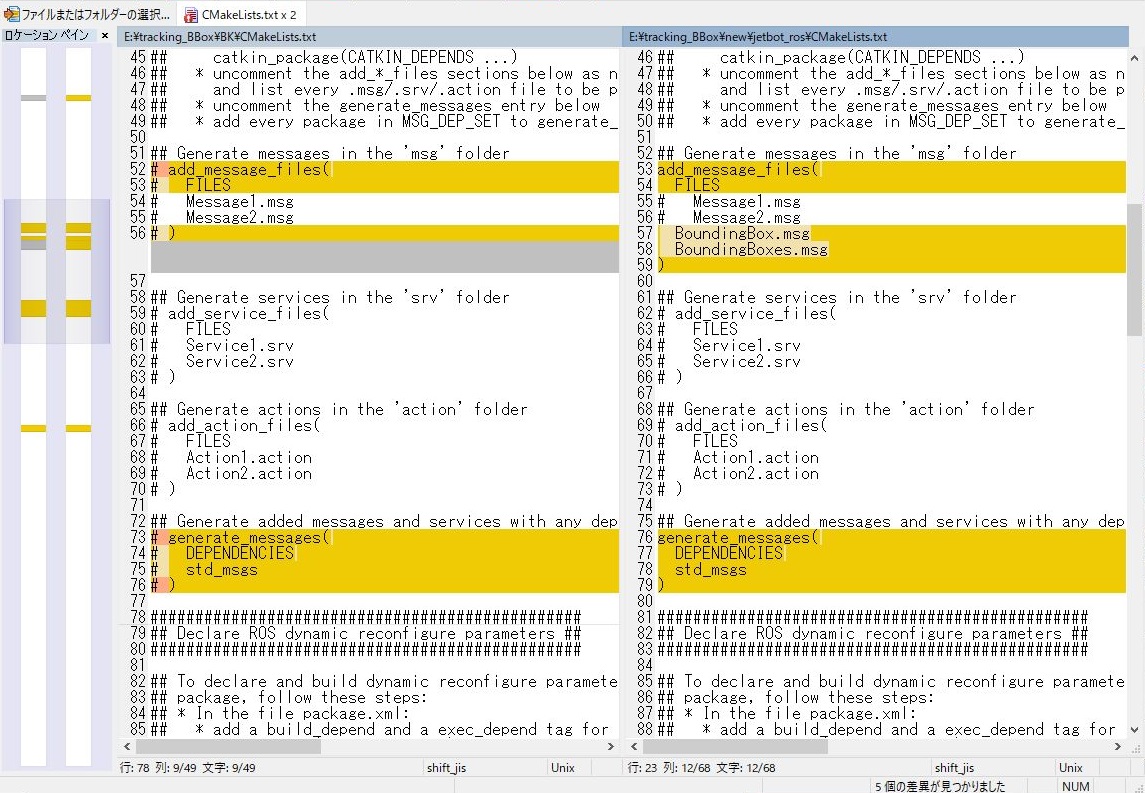
物体検出で取得したBoundingBoxをROSでpublishする方法
今回は物体検出で取得したBoundingBoxをROSでpublishする方法について記載していきます。 物体検出した場合、その結果のBoundingBoxなどをどのように連携して利用するかというところが課題になってくる...
 AI
AI今回は物体検出で取得したBoundingBoxをROSでpublishする方法について記載していきます。 物体検出した場合、その結果のBoundingBoxなどをどのように連携して利用するかというところが課題になってくる...
 AI
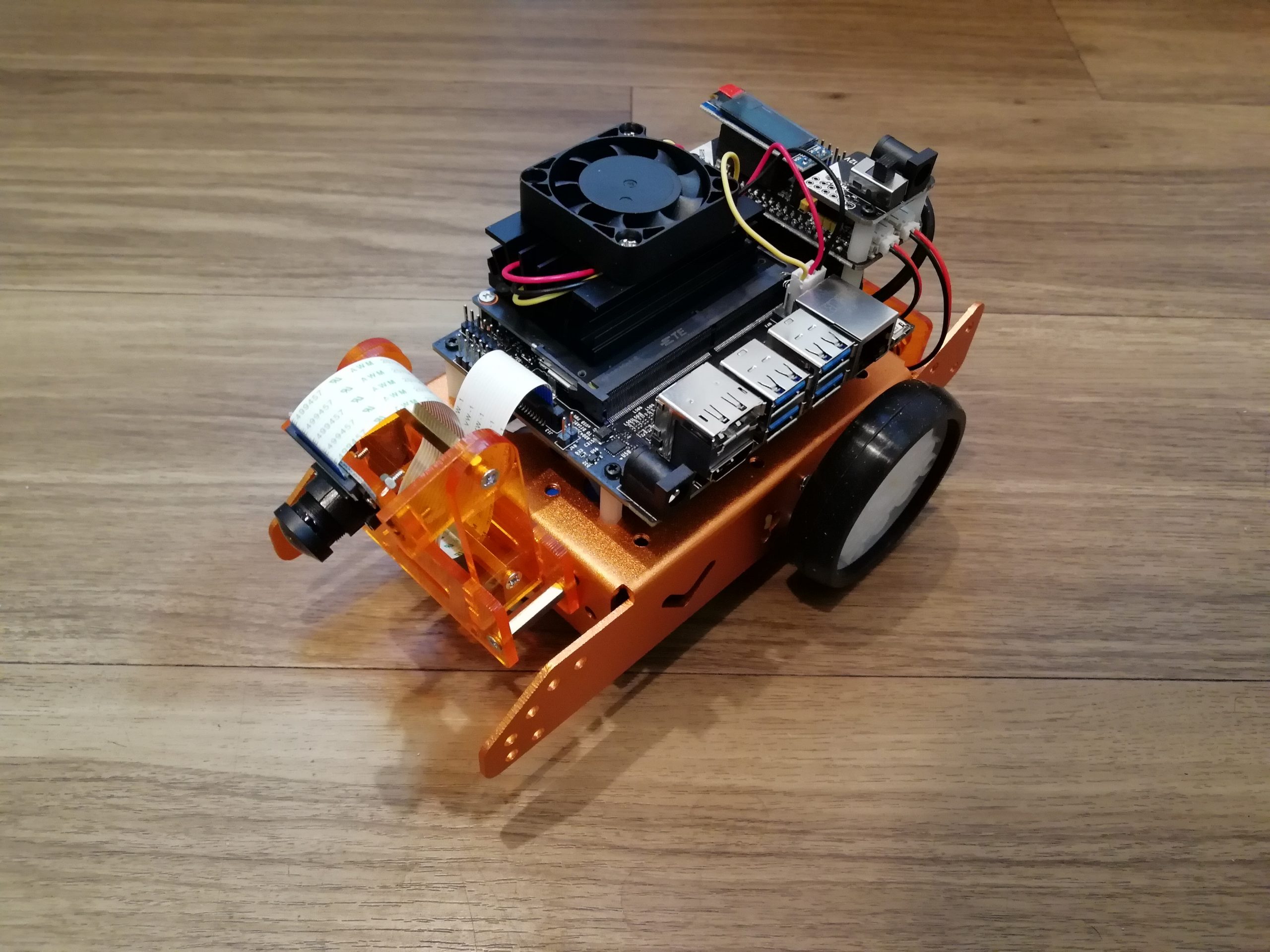
AI今回はJetsonNanoでROSを自動起動する方法について説明していきます。 JetsonNanoにROSを入れ、例えばロボットを動かすときなどに毎回ターミナルでROSを起動するのは面倒かと思います。 そこで今回はJe...
 AI
AI今回はJetsonNanoにROS(Melodic)をインストールし、Jetbotを動かすところまで説明したいと思います。 参考サイト 今回は以下の記事の手順を参考にしています。 ROS nodes and Gazebo...

KAZUKIです。
モノづくりが好きで、ブログでは電子工作やゴミ回収ロボットのことを書いています。
その他雑記も書きます。興味のある記事がありましたら是非読んでみてください。
< Twitterプロフィール >
https://x.com/RoomKazuki