Kazuki Room ~ モノづくりブログ ~
こちらのページに移管しました!
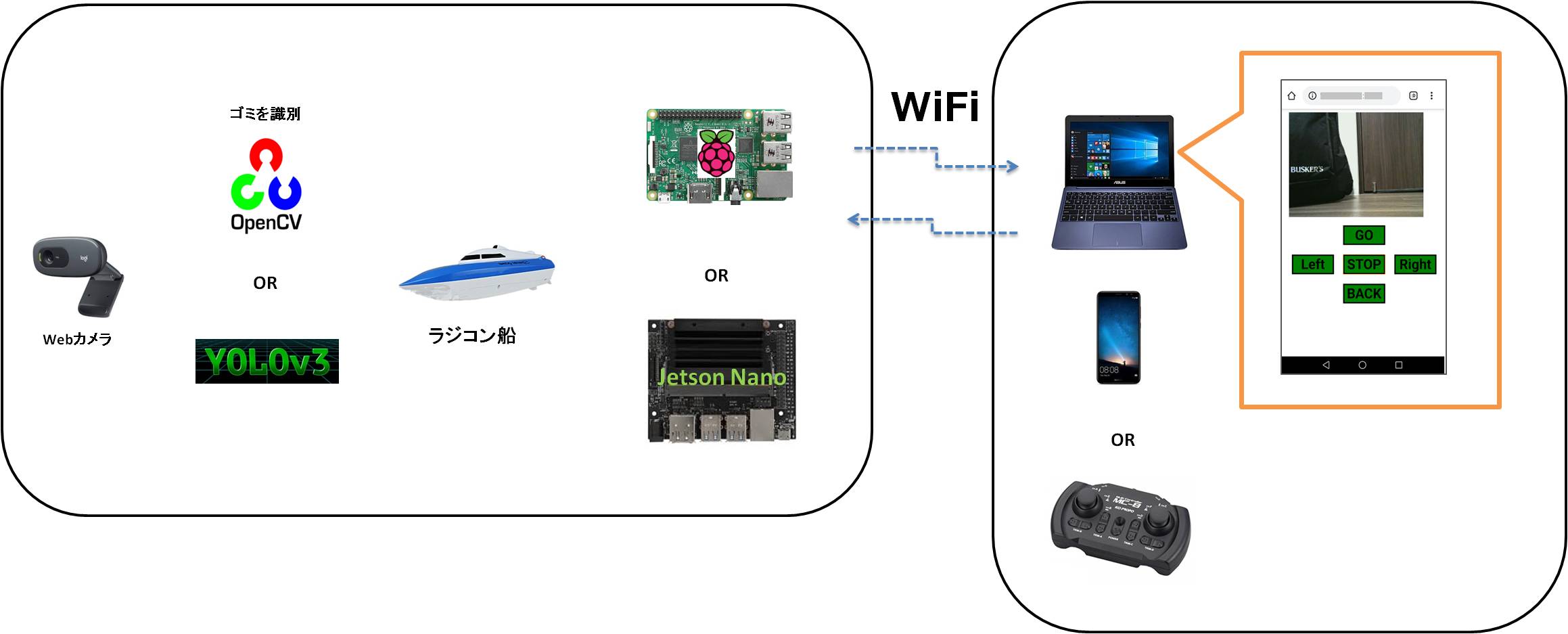
海や川のゴミをロボットで回収することは可能なの?実際にゴミ回収ロボットを開発してみた
KAZUKIです。 モノづくりが好きで、ブログでは電子工作やゴミ回収ロボットのことを書いています。
その他雑記も書きます。興味のある記事がありましたら是非読んでみてください。
< Twitterプロフィール > https://x.com/RoomKazuki
管理者ページ