RaspberryPiとPCA9685でサーボモータが動かない原因を探る
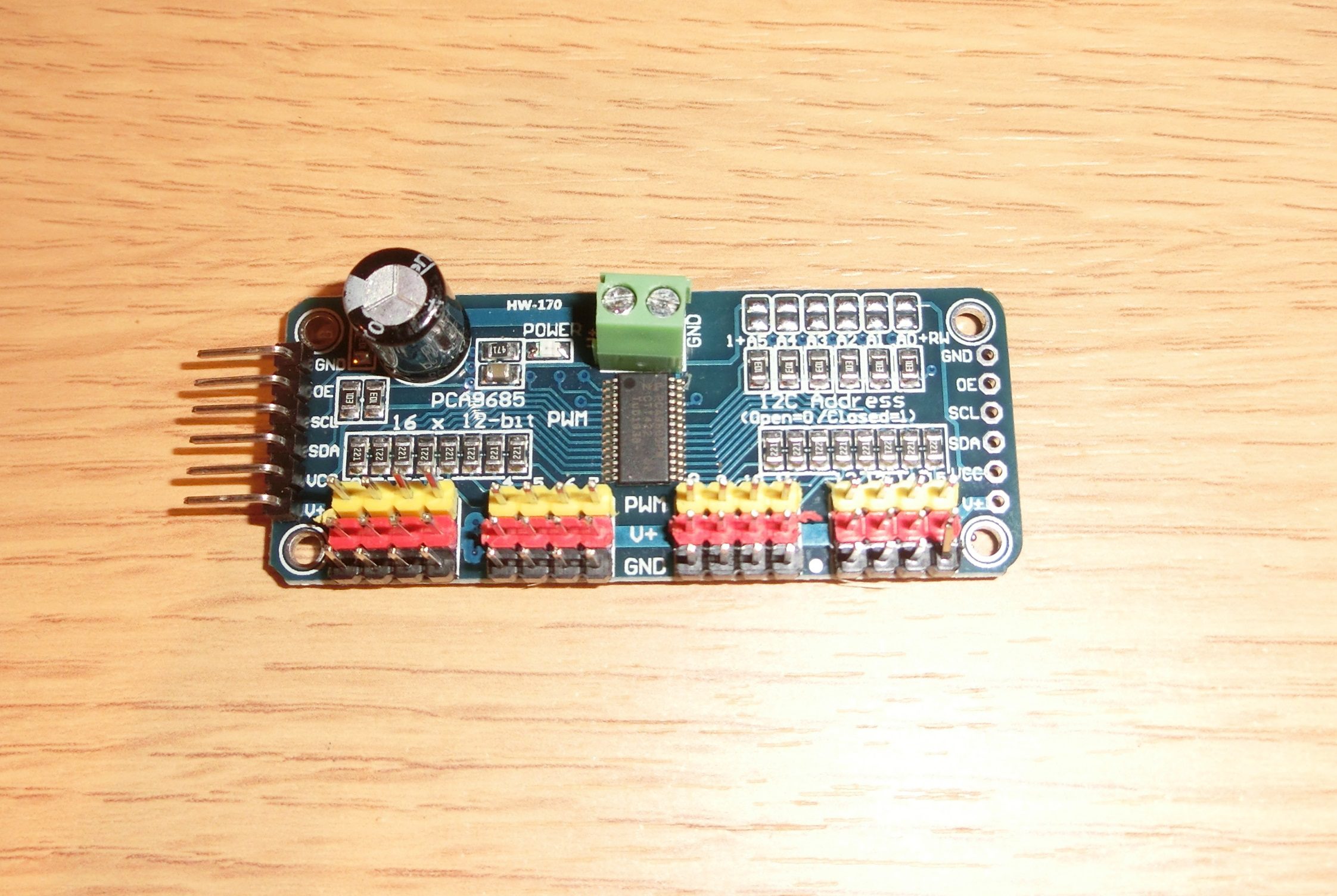
今回はRaspberryPiとサーボモータドライバのPCA9685でサーボモータを動かそうとしてみましたが、動かすことができませんでした。 その原因について色々と調査してみましたので、そのときのことを記録しておこうと思い...
 電子工作
電子工作今回はRaspberryPiとサーボモータドライバのPCA9685でサーボモータを動かそうとしてみましたが、動かすことができませんでした。 その原因について色々と調査してみましたので、そのときのことを記録しておこうと思い...
 電子工作
電子工作前回と前々回までは「wiringpi」のソフトウェアPWMを使用していましたが、こちらの方法だとサーボモータがガタガタと振動してしまいました。それでは少し実用性に欠けるので、今回はハードウェアPWMを使用してサーボが振動...
 電子工作
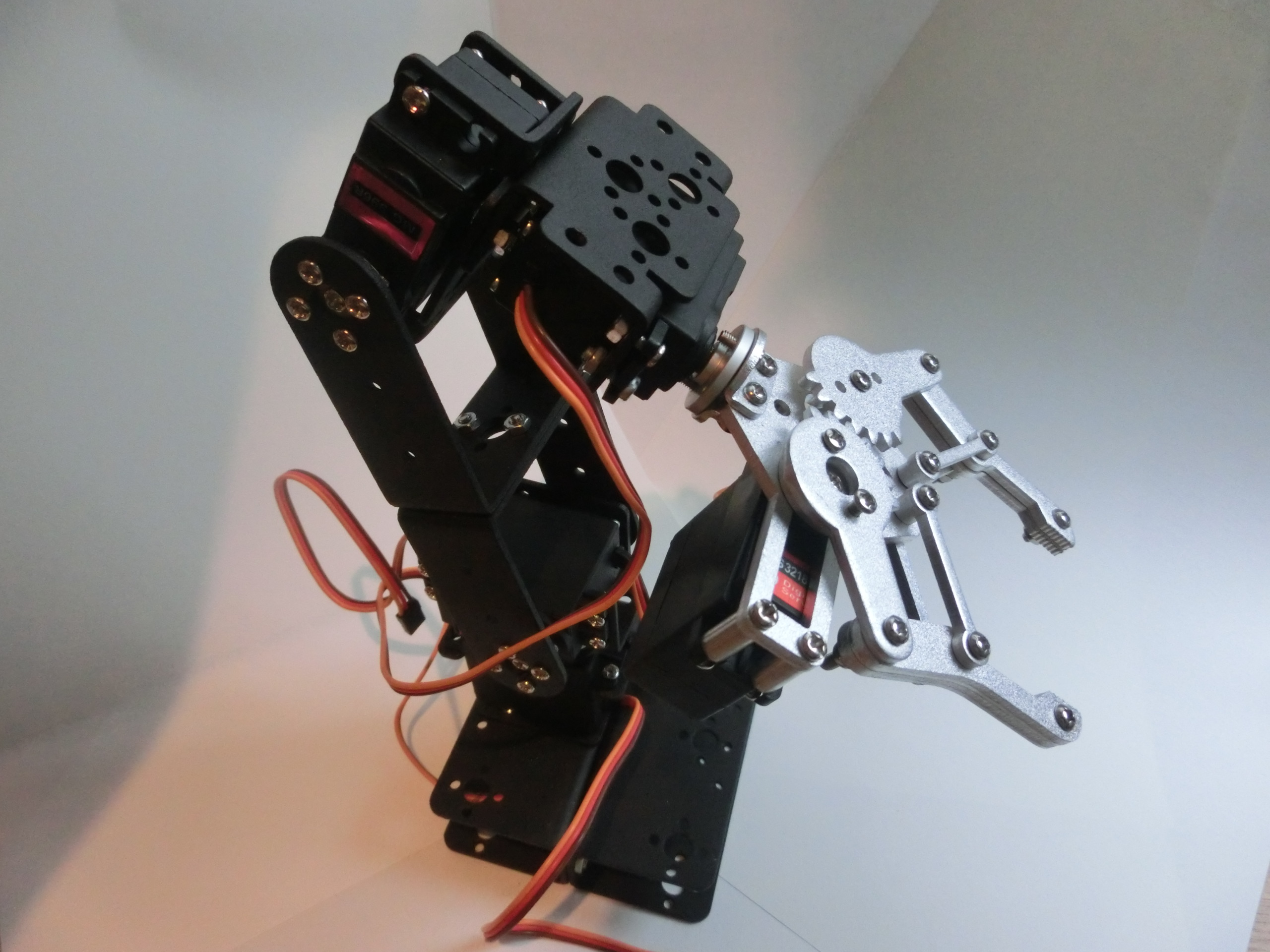
電子工作今回はRaspberryPiとサーボモータでサインスマートの5軸ロボットアームを動かしてみましたので、そのときの情報を書いていきたいと思います。作ったロボットアームでボトルキャップチャレンジをやってみたときの様子がこちら...
 電子工作
電子工作前回の記事でRaspberryPiのサーボモータを無事動かすことができました。でもどうせなら計算式などを理解して自分でパラメータを変えたい!とか思ってかなり試行錯誤してみたのですが、内容を理解するのには苦労しました。 そ...
 C#
C#今回はC#のWaitOne()でスレッドを停止させて動きを確かめてみたいと思う。 まずは以下のWaitOne()が含まれるソースを実行してみる。今回のプログラムではメインスレッドとサブスレッドが並列で処理されるようになっ...
電子工作今回はブラウザのスライダーでRaspberryPiのサーボモータを動かしてみたいと思います。 使用するサーボモータはMG996Rです。情報もなかなか少ないので、備忘録も兼ねて記事にしていきます。 参考サイト 今回はこちら...
 C#
C#デリゲートとはなんだ? C#にはデリゲートという機能が存在する。今回はそれについて理解を深めてみようと思う。 まず、デリゲートと聞いてパッと言葉のイメージがつかないのは自分だけではないはず。もっとイメージが湧くワードをチ...
 C#
C#今回はC#のスレッド処理について理解を深めてみようと思う。 並行して処理が行われるのはすぐにイメージできるが、プログラムにしてみると少しイメージが薄れてしまう。 なので、簡単なスレッド処理を動かし、それをイメージ図にして...

KAZUKIです。
モノづくりが好きで、ブログでは電子工作やゴミ回収ロボットのことを書いています。
その他雑記も書きます。興味のある記事がありましたら是非読んでみてください。
< Twitterプロフィール >
https://x.com/RoomKazuki